|
Design of a Long Overland Conveyor
with Tight Horizontal Curves |
|
J.L. Page, R.S. Hamilton,
G.G. Shortt and P. Staples, South Africa
Courtesy : Trans
Tech Publications - Bulk Solids Handling Journal
Summary
This paper
describes the design, construction, commissioning and testing of a 1,000 t/h
capacity, 3.2 km long overland belt conveyor that incorporates two 1,350 m
radius horizontal curves, taking the path of the conveyor through an angle of
950. The conveyor forms part of Amcoal's new Landau Colliery
The static
design and dynamic simulations were carried out within the Anglo American
Corporation. This was followed, at the University of the Witwatersrand, by a
series of iterative studies of the effects of a variable speed electrical
drive. The design was audited by Bateman Materials Handling, using proprietary
software.
The main
features are highlighted, i.e. the use of differential-flow fluid couplings to
control the belt start-up, the inclusion of additional drive inertia to extend
and control the belt shut-down, and the idler banking in the horizontal curves.
After successful
commissioning and testing, the conveyor system received a 1993 Projects and
Systems Award from the South African Institution of Mechanical Engineers.
1. Introduction
Amcoal's Landau
Colliery is situated 85 km due east of Pretoria and 120 km north-east of
Johannesburg. The colliery forms part of South African Coal Estates which also
operates the Rapid Loading Terminal (RLT). Coal is railed from the RLT to the
Richards Bay Coal Terminal for export.
In 1990, Amcoal
embarked on feasibility studies to source coal to meet its increased share of
export capacity at the Richards Bay Coal Terminal and also to replace the old
Landau No. 3 reserves which would be depleted in 1993. These studies led to the
development of the new Landau Colliery, exploiting the Kromdraai reserves and
processing the coal through a new washing plant built on the site of the old
Navigation washing plants.
As part of the
new Landau development, a 3.2 km overland belt conveyor was required to feed
export coal from the new Navigation Plant to the RLT. Property ownership
boundaries dictated a tight curved route. The conveyor has a capacity of 1,000
t/h. It incorporates two 1,350 m radius horizontal curves, taking its path
through an angle of 95.
This paper
describes the design, construction, commissioning and testing of the overland
conveyor.
The static
design and dynamic simulations were carried out within the Mechanical
Engineering Department of the Anglo American Corporation of South Africa
Limited (AAC), assisted by the University of the Witwatersrand (Department of
Electrical Engineering) in examining the suitability of a variable speed
electrical drive. Bateman Materials Handling Limited audited the design, using
proprietary software, and contributed during commissioning.
The main
features are highlighted, i.e. the use of differential-flow fluid couplings to
control the belt start-up, the inclusion of additional drive inertia to extend
and control the belt shut-down, and the idler banking in the horizontal curves.
2. Conveyor
Requirements
2.1 Capacity and
Belt Specification
The material to
be conveyed was coal of -32 mm size and a density of 0.85 t/m.
The design capacity
was set at 1,000 t/h for the initial condition, with the requirement that the
system be considered for a capacity of 1,500 t/h for the future condition.
The belt width
was fixed at 1,050 mm, in order to be compatible with the existing overland
conveyor systems from the neighboring Kleinkopje Colliery. This fixed the belt
class as well (ST 850), since it was envisaged that a single source of spares
could be utilized. This choice also allowed quick access to either mine in the
case the need arose for emergency spares.
2.2 Restricted
Route
Several conveyor
routes were investigated. The most obvious route was the direct one. However,
this entailed crossing ground belonging to another mining group. The ground had
been undermined, leaving irregular pillars. The route also meant crossing an
active vlei. All this made the direct route less attractive.
The selected
route was determined by economic factors. To exclude the purchase of extra
land, including the mining rights, the conveyor was required to follow a disused
Amcoal railway servitude curving down towards the RLT. The chosen route implied
that the conveyor would be required to negotiate two very tight horizontal
curves and cross the national road from Ogies to Witbank, as well as a double
railway line running alongside the road. Further down the route, there were two
minor access roads to negotiate.
Fig. 1 shows a
plan of the conveyor route. The horizontal tail curve and head curve radii were
1,330 m and 1,350 m respectively, and the overall included angle was 950. This
meant that the horizontal curve radii were amongst the smallest in the world,
and the included angle one of the largest, for this type of conveyor.

Fig. 1: Plan of conveyor route
The original
layout considered elevating the conveyor over the major road and rail crossing.
The 7 m elevated gantry would have had to span approximately 100 m. The cost of
the steelwork, with the danger of wash-down and spillage onto the road or the
rail eventually resulted in the decision being taken to cross the road and rail
underground. The crossing itself is also in one of the horizontal curves and
this would have made the elevated option more difficult and costly than would
normally be the case, given that the gantries would have had concrete floors.
At the two minor
roads, the conveyor crossings were both achieved by means of concrete culvert
and ramps on each side.
The coal had to
be discharged into a 6,000 t holding silo, at 49 m above ground, before being
conveyed across another road into the RLT complex. To allow for a second feed
to another holding silo in the future, it was decided to stop the overland
conveyor short and transfer onto a second conveyor to the silo.
The conveyor
therefore has an overall net fall of 13 m from the tail to the head. The lowest
point on the conveyor carrying strand occurs at the approach to the head end. This
point is at -21 m with respect to the tail.
The drive
pulleys are located on the ground behind the head pulley.
3. Design
Procedure
3.1 Static
Design
Based on the
above conveyor requirements, the initial static design was undertaken according
to the usual AAC design procedure [1] and produced the following results:
|
Belt Width |
1,050 mm |
|
|
Belt Specification |
ST 850 steelcord |
|
|
Belt Speed |
3,57 m/s |
|
|
Drive Configuration |
Induction motors and fluid couplings: |
|
|
Start-up Procedure |
Soft start |
|
|
Tension Distribution |
T1 = 107kN T2 = 14kN Te = 93kN Te = 8kN |
|
|
Take-up |
Gravity |
|
|
Power requirements |
Empty belt Fully loaded belt |
|
|
Motor selection |
3 x 132 kW |
|
|
Reducer ratio |
25.6:1 (nominal) |
|
|
Pulley diameters |
Head 800 mm Drive 1,250 mm High tension Low tension |
|
|
Idler pitch |
Carry: 1.2 m Return: Out of curve 6 m. |
|
3.2 Dynamic Simulation
The use of static design techniques alone is adequate in the case of
short plant conveyors where belt flexibility does not significantly affect the
behavior of the belt during starting and stopping. However, in the case of long
overland conveyors, where tension waves generated at drive and braking pulleys
take a considerable amount of time to propagate along the length of the
flexible belt, more detailed dynamic analysis is required to ensure acceptable
system behavior under start-up and shut-down conditions. Elements of system
behavior that cannot be adequately predicted using static analysis alone
include peak belt tensions, displacement of gravity take-ups, belt slippage
over drive pulleys and forces generated in holdback devices.
Dynamic analysis of the overland conveyor was carried out within AAC on
a 386-PC using ACSL (Advanced Continuous Simulation Language). This is a
general purpose language, based on FORTRAN, designed to help the engineer to
mathematically model and analyze the behavior of continuous-time systems. In
ACSL, the system to be simulated is defined using linear or nonlinear
differential equations. These are then integrated numerically over short time
steps to produce time histories of system response. ACSL has been used in the
Mechanical Engineering Department since 1989 to model various systems, mostly
winder related.
The model of the conveyor consisted three main elements: (1) the
mechanical subsystem comprising the belt, idlers, take-up, pulleys, reducer and
later the fly-wheels; (2) the drain-type fluid couplings and their associated
oil-flow regulating system; and (3) the induction motors.
3.2.1 Mechanical Subsystem
In modeling the belt, only axial motion was considered. Although lateral
motion of the belt in the tight horizontal curves was an important design
consideration, the strong damping of lateral motion allowed adequate
predictions to be made using static equilibrium calculations based on
dynamically simulated belt tensions.
The mass of the belt; idlers and load material was represented by 32
lumped masses evenly spaced along each of the carrying and return strands (as
shown in Fig. 2). The masses were connected by springs which were linear under
tension but exerted no compressive force. Motion of the masses was resisted by
Coulomb friction elements with friction constants set to correspond to the
composite friction factor used in the AAC static analysis. Since the steel
cords dominate the elastic behavior of the belt chosen for the conveyor, the
more complex viscoelastic behavior of the rubber which needs to be modeled when
using more flexible belt constructions), was ignored. Nonlinear stiffness
effects introduced by sagging of the belt between the idlers was also
considered to be a secondary effect and was ignored. Due to the high stiffness
of the short lengths of belt connecting the head pulley and the two
drive-pulleys, these three inertias were treated as a single node with rigid
connections. Intermediate tensions and the tension ratios across the drive
pulleys were calculated using the principle of dynamic equilibrium.

Fig. 2: Conveyor
Mechanical Model
The vertical topography of the conveyor was used in the model to
calculate, for each belt node, the component of belt and load weight acting
axially to the belt.
The number of nodes in the carrying and return strands can be varied. In
this way, a sensible balance between accuracy and computation speed can be
determined. It was found that, contrary to expectations, as few as 10 elements
in each strand are sufficient to predict the primary dynamic effects during
start-up and shut-down.
3.2.2 Modeling of Fluid Couplings
The fluid coupling transmits torque generated by the induction motor to
the drive pulley via the reducer. The amount of torque transmitted depends primarily
on (1) the volume of oil in the coupling and (2) the speed of the output shaft
relative to that of the input shaft (referred to as slip).
Characteristic torque-slip curves are supplied by coupling
manufacturers. The curves for the Voith 487 TPE coupling (see Fig. 3) were
defined in the ACSL model as a matrix of torque values. During a simulation,
torque was calculated by two dimensional interpolation using the input and
output shaft speeds and the volume of oil in the coupling, all of which were
state variables of the system.
The rate Qout at which oil drains from a Voith 487 TPE
coupling when rotating at rated speed can be approximated by the following
nonlinear equation supplied by the coupling manufacturer.
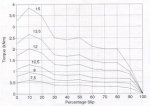
Fig. 3:
Characteristic torque-slip curves for fluid coupling (for various oil volumes
in litres)
Qout
= 0.0475
√F(15-0.25f) + 0.317
where: Qout is in litres/sec
F is the volume of oil in the coupling in litres.
Oil flow into the coupling is controlled by a solenoid valve in an
on-off fashion (Qin is either 1.0 l/s or zero).
The volume of oil F(t) in the coupling at any time was obtained in the
ACSL program by integrating the nett flow rate of oil, i.e.
F(t) = t∫0
[Qin(t) - Qout (F,t)]dt
3.2.3 modeling of Induction Motor
The induction motors were represented in the ACSL model by the equation
of the non-transient torque curve given below (Fig. 4). However, since fluid is
only pumped into the couplings once the motors are running in the steep
operating region of the curve, motor speed variation has minimal effect on the
dynamics of the conveyor. A constant speed representation of the motors would
be adequate for most start-up and shut-down simulations.
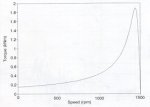
Fig. 4:
Characteristic of a 132 kW induction motor
3.3 Changes to Solve Dynamic Problems
Arising from the dynamic analysis, a number of changes were made to
aspects of the conveyor configuration to solve problems which arose.
3.3.1 Increased Take-Up Tension
The preliminary selection of take-up tension (14 kN) was inadequate to
overcome belt slip on start-up, as evidenced by comparing the tension ratios
(T1/T2) across the drive pulleys with the critical value of 3.2 (see Fig. 5). Hence
the take-up tension was increased to a minimum of 20 kN.
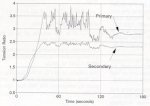
Fig. 5:
Tension ratios across drive pulleys
3.3.2 Extended Start-Up Time
The static design calculated the conveyor start-up time to be 38
seconds. On simulating the start-up, high peak tensions were produced. These
high tensions were reduced by extending the start-up time to 120 seconds (Fig.
6).
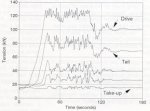
Fig. 6a: Belt
tensions (start-up)
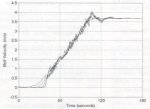
Fig. 6b: Time
(seconds)
3.3.3 Control of Maximum Torque During Start-Up
To maintain the start-up torques below the limit of the electric motors,
and to achieve the extended start-up time, a maximum start-up torque limit was
imposed and used to control the power applied by the motors. This was achieved
in practice by controlling the oil flow into the fluid couplings using an
on-off solenoid valve. Fig. 7 shows the "saw-tooth" torque profile
during acceleration of the belt to full speed. The very long accelerating time,
however, required the installation of bigger (160 kW) motors to minimise the
thermal effects of the extended accelerating period under full load.
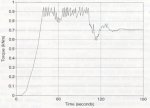
Fig. 7: Primary
drive fluid coupling torque
3.3.4 Control of Shut-Down Using Flywheels
On shut-down it was found that theoretically "negative"
tensions were developing in the carry strand (Fig. 8). To solve this, the
take-up tension was further increased to 30 kN and inertia, in the form of a
flywheel, was added to each drive unit. The alternative of a tail brake was
rejected as an inferior solution to flywheels. The improved shut-down tension
behavior is shown in Fig. 9.
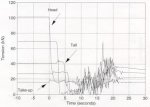
Fig. 8: Belt
tensions (shut-down)
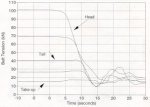
Fig. 9: Belt
tensions with flywheels (shut-down)
3.4. Increased Capacity
The future capacity of 1,500 t/h was allowed for in the static design
and the dynamic analyses. It was found that the following aspects would have to
be changed, as indicated in Table 1.
To allow for these changes, the drive base frames were manufactured for
the future condition, with adapters to suit the smaller components. The take-up
tower and counterweight were designed for the maximum load (18,000 kg). The
flywheel was designed to allow for additional annular rings to be bolted onto
the primary disc to increase the inertia. The structure was designed to
accommodate the maximum expected tensions.
|
|
1,000 t/h |
1,500 t/h |
|
|||||
|
Belt Speed |
3.57 m/s |
5.30 m/s |
|
|||||
|
Tension Distributor |
T1 |
123 kN |
134 kN |
|||||
|
Power Requirements - full belt |
331 kW |
500 kW |
|
|||||
|
Motor Selection |
3 x 160 kW |
3 x 220 kW |
|
|||||
|
Fluid coupling selection |
Voith 487TPE |
Voith 562TPE |
|
|||||
|
Reducer ratio |
26.6/1 |
17.9/1 |
|
|
|
|
|
|
|
Take up mass |
13,500 kg |
18,000 kg |
|
|
|
|
|
|
|
Inertia |
40 kg/m |
80 kg/m |
|
|
|
|
|
|
|
Drive pulley diameter |
1,250 mm |
1,250 mm |
|
|
|
|
|
|
Table 1: Comparison of parameters
for the increased capacity
4. Choice of
Drive System
4.1 Fluid
coupling
Fluid couplings
are well known in mechanical drive systems to accelerate loads with high
inertia.
Differential-flow
(acceleration control) couplings were chosen for this application due to their
simplicity, cost effectiveness, ability to control the belt start-up to any
desired format and the facility to run the conveyor at belt inspection speed
without the use of a separate pony drive.
Each coupling
consists of a normal traction coupling surrounded by an oil-tight enclosure
(Fig. 10). The rotor is fitted with orifices in the periphery. The coupling is
initially empty of oil. The drive motor is started under no load. Oil is then
pumped from a separate reservoir, through a solenoid valve, to the rotor. As
the coupling fills with oil, torque is transmitted to the output stator which
steadily accelerates. Oil continuously drains from the coupling, but the
coupling fill is determined by the higher flow entering the coupling (hence the
term "differential-flow").
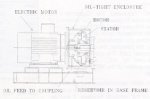
Fig. 10: Fluid coupling
To limit the
torque transmitted and thereby extend the start-up time of the conveyor, the
solenoid valve is closed for short periods of time thus momentarily reducing
the coupling fill. Control of the solenoid valve is effected by measuring motor
power through a PLC.
Fig. 11 shows
the layout of each drive unit.
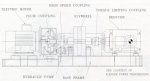
Fig. 11: Drive Unit
4.2 Belt
Inspection
By setting a
needle valve in the hydraulic circuit the oil fill can be markedly reduced, and
the coupling slip increased. This is employed to reduce the belt speed to about
1 m/s for belt inspection purposes. From the elevated slip conditions, the heat
gained by the oil is dissipated in an airblast radiator fitted in series in the
hydraulic circuit. Thus, separate pony drives are obviated.
4.3 Assessment
of Electrical Variable Speed Drive
Early in the
project, it was decided to investigate another drive system: an AC variable
speed drive. The choice of drive was a pulse width modulated (PWM),
current-controlled inverter feeding a squirrel cage motor. The same arrangement
of the drive units on the primary and secondary pulleys was used, but each
motor would drive the same reducer directly.
AAC, requested
the Department of Electrical Engineering of the University of the Witwatersrand
(WITS) to collaborate with simulation work. The complete drive system was
simulated, including the supply, the converter, the motor and the mechanical
load. The conveyor model, developed by AAC, was used as a sub-system of the
WITS in-house package.
The work
demonstrated that an AC variable speed drive was technically suited to drive
the conveyor. However, it was decided to continue with the fluid coupling
option on the basis of cost, simplicity, ease of trouble-shooting, and
standardization with other drives.
5. Design Audit
A design audit
was contracted to Bateman Materials Handling Limited, using the computer
software as developed by Conveyor Dynamics Incorporated of the USA. Work
progressed, on a co-operative basis with AAC, to refine the mechanical details.
The audit
procedure consisted of undertaking a dynamic simulation of the starting and
stopping cycles of the conveyor, as statically designed by AAC, under various
load conditions.
5.1 Shut-Down
Analysis
Shut-down
simulations (power outage) confirmed that the conveyor was subject to major
tension fluctuations, during stopping, which would adversely affect the ability
of the belt to remain in the troughing idlers in the horizontal curves. Braking
or inertia devices were suggested. Further simulations were undertaken to
optimise the size of the chosen flywheel, with the aim of achieving the
smoothest possible shut-down profile on both the velocity and tension
distributions. Figs. 12 and 13 show the resultant effect of the flywheel. Also,
the flywheel has the effect of reducing take-up movement from a predicted 4 m
travel to 1.3 M.

Fig. 12: Velocity profiles on
shut-down
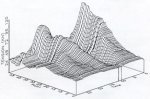
Fig. 13: Tension profiles on
shut-down
5.2 Start-Up
Analysis
The procedure
adopted for the start-up analysis followed the same format as the shut-down
analysis. Once the relevant performance curves were obtained from the fluid
coupling supplier, the torque/time parameters were incorporated into the model
which allowed for the simulation of the start-up sequence. This same procedure
would apply to any soft-start system.
5.3 Aborted
Start Analysis
To conclude the
analysis, a series of "what-if" scenarios were undertaken, revolving
around the aborted start, i.e. the tripping of the drive motors when belt
tensions were peaking during start-up.
This work
concluded that, even under extreme conditions, tension waves could not be
generated which would adversely affect the performance of the conveyor in the
horizontal curves. This was as a result of the damping effect of the flywheels.
5.4 Idler
Banking in Horizontal Curves
Having obtained
full tension profiles, at points along the length of the conveyor, from the
starting and stopping cycles of the conveyor, it was then possible to analyse the
curve geometry and calculate idler banking angles. The horizontal drift of the
belt was determined, using a gravity principle, throughout the tension
profiles, for various idler banking angles.
Thus, by being
able to predict the tensions at the horizontal curve tangent points, it was
possible to calculate the expected belt drift for various load conditions. Table
2 shows a typical simulation output.
|
Type |
Load |
Tension |
Bank angle |
Radius horiz. |
Radius vert. |
Belt drift |
|
Carry |
100 |
120 |
6 |
1350 |
1000 |
-3 |
|
Carry |
50 |
80 |
6 |
1350 |
1000 |
-4 |
|
Carry |
0 |
60 |
6 |
1350 |
1000 |
75 |
|
Carry |
100 |
20 |
4 |
1330 |
500 |
-30 |
|
Carry |
50 |
20 |
4 |
1330 |
500 |
-40 |
|
Carry |
0 |
30 |
4 |
1330 |
500 |
-20 |
|
Return |
0 |
40 |
2 |
1350 |
1000 |
50 |
|
Return |
0 |
30 |
2 |
1330 |
500 |
25 |
Table 2: Expected belt drift in
horizontal curves
From the above it can be seen that the expected belt displacement about
its centreline will vary between 75 mm inside the curve to 40 mm outside on the
carry strand and between 25 and 50 mm inside on the return strand.
5.5 Idler Rolling Resistance
The idler rolling resistance was considered to be critical for the
successful operation of the system, and continues to be so. There have been
cases in the past, where long overland conveyors have required every other
carrying idler set to be removed during commissioning, in order to get the belt
to start initially. This process had to be repeated with alternating idler sets
until they had been run in. The cost and duration of such commissioning was
completely unacceptable, and the idler manufacturer was required to provide
proof of the idler roll breakaway force. Values of a random sample of idler
rolls, both carry and return, were taken. The idler rolls were tested on a
continuous basis, in order to guarantee the results. A breakaway force of not
more than 1.5 N was required.
The results of an analysis of a sample batch are shown in Table 3.
|
Pan |
Breakaway |
Relative frequency (%) |
|
|
return |
carrying |
||
|
50 |
0.5 |
4.9 |
3.1 |
|
100 |
1.0 |
58.5 |
56.3 |
|
150 |
1.5 |
24.4 |
37.5 |
|
200 |
2.0 |
12.2 |
3.1 |
Table 3:
Analysis of sample batch
The spread of the breakaway force of the idler rolls tested is
illustrated by the histogram in Fig. 14.

Fig. 14: Idler
roll breakaway force
The average values for the breakaway force were 1.20 N for the return
idler rolls and 1.18 N for the carry idler rolls, both well within the limit of
1.5 N specified in the dynamic analysis. Attention is being given to
quantifying this aspect in the form of running resistance values in a revision
of the national standard, SABS 1313 [2], currently under review.
6. Construction and Commissioning
6.1 Overland Structure
In order to reduce capital expenditure, a source of used conveyor
structure was found and the sections designed into the overland portion of the
conveyor. The structure was designed for a 1,050 m wide conveyor and was
equipped with a dog-house on open stringers without deckplates. The sections
are in 3.0 m lengths, with angle legs.
The use of second-hand structure required considerable preparation of
the steelwork, though, and all the steel was sand-blasted and painted on site. The
elevated portions of the conveyor, at the tail and at the head, were equipped
with new steelwork, purpose-designed to cater for the belt turnover and the
elevation into the drive and transfer house. The overland conveyor stringer
modules were supported in augured holes filled with concrete after alignment
for most of the overland section of the conveyor. Elsewhere, the structure was
supported on concrete sleepers where the ground was undermined.
6.2 Tail Curve
A critical area was the tail curve, where the conveyor profile dipped under
the road and rail crossings. The tunnel was constructed in straight sections,
each approximately 100 m long.
The construction was a simple rectangular culvert-type tunnel, with the
soffit not quite 2.0 m above the finished floor level. The conveyor steelwork
was designed to be hung from the soffit, with the vertical hangers welded to
cast-in plates after alignment. The initial conveyor installation followed the
wall, thus there was no horizontal curve in that area, only three straight
sections.
The belt did not bed down properly in the curve and a good deal of
lateral drift was experienced at first start-up, particularly in the tunnel
area. The belt horizontal line consisted of a series of interlinking curves of
varying radius, some as low as 350 m, (the reason for the belt climb-out in the
tunnel). In addition, the design vertical curve into the tunnel was not
followed, with the result that the belt actually lifted out of the idlers in
that area, with the accompanying uncontrolled drift to the inner curve.
A survey was carried out in order to establish the correct conveyor
set-out line in the tunnel. When the structure was corrected, the belt
performed well. The return idlers were spaced at 6.0 m in the tunnel, instead
of the design requirement of 3.0 m. The result was that lateral drift was
experienced in certain areas in the tunnel, with the belt drifting heavily into
the structure on the inner curve. The return idlers were banked in these areas,
up to about 100 and more. However, additional idlers were installed and the
banking angle reduced to 4.
6.3 Idler Banking
The idlers on both the carrying strand and return strand were adjusted
along the full length of both horizontal curves, in order to achieve the best
lateral location of the belt under the varying conditions. In a number of
places in the curves, 'punches" were installed, over a distance of about 5
idler pitches, on the carrying strand only. The punch was a set of idlers where
the banking was much higher than normal. This has the effect of punching the
belt back into line, should excessive drift occur. The normal banking angles in
the curves were 60 at the head end carrying strand, 40 at the tail carrying
strand and 2 for both the head and tail return strand curves. There were
places where the banking angle was increased by packing, to cater for
inaccuracies in erection and construction. There was a lead-in to each
horizontal curve, over 10 idler pitches, where the conventional carrying idlers
were banked in steps to smooth the belt approach and depart sections in the
curve. After successful commissioning, the punches were removed and the belt
allowed to settle down normally.
7. Testing
After the completion of commissioning, tests were carried out to compare
actual performance to predicted performance. The test method was as follows.
7.1 Test Method
The conveyor was run through the cyclic phases of start-up, steady state
and shut-down whilst being loaded to 0% (empty), 70%, 100% (rated capacity) and
120% (20% overload).
During the steady state periods, manual readings were taken of:
motor speed (rev/min)
fluid coupling output speed
(rev/min)
motor voltage across each pair
of phases
motor current for each phase.
The time to start and stop was taken with a stopwatch, whilst monitoring
the fluid coupling output speed with a non-contact tachometer.
During the transient start-up and shut-down periods, recordings were
made of the following parameters:
motor power (kW) for each motor
belt speed (m/s) at the head and
drive pulleys
take-up displacement (m).
7.2 Results
Fig. 15 shows a typical motor power trace whilst starting a loaded belt.
The initial gradual increase of power delivered reaches a maximum when the
upper power limit cuts the oil flow to the coupling and the coupling fill
diminishes. The lower power limit signals the oil to fill the coupling again. The
resultant saw-tooth profile continues until the entire belt is up to speed and
the absorbed power drops to normal operating levels.
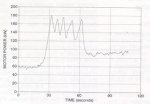
Fig. 15: Motor power (start-up)
All three drive units shared the power requirement equally; typical
steady state values were 92, 97 and 94 kW at 1 00% load. Manual reading
confirmed the transducer readings. There was an average 3% slip over the fluid
couplings at rated belt capacity (100% load).
7.3 Comparison with Design
The graphs (Figs. 16, 17 and 18) show the predicted plots for the loaded
start showing anticipated power draw, belt velocity at the drive pulley and
take-up displacement, respectively. Superimposed on these curves are the actual
measured values.
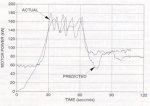
Fig. 16:
Comparison of motor power (start-up)
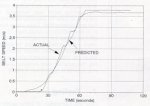
Fig. 17:
Comparison of velocity (start-up)
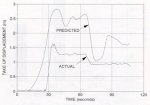
Fig. 18:
Comparison of take-up displacement (start-up)
It can be seen that both the motor power and belt velocity curves
compare favorably. The predicted curves wore obtained by re-running the
simulation after lowering the friction factor from 0.022 to 0.017. This is
consistent with the idler rolling resistance as discussed in section 5.5. Having
tested the rolls, it was discovered that the breakaway force was generally 1.0
- 1.2 N, which is over 20% lower than the design factor of 1.5 N, resulting in
a power saving of approximately 10%.
With regards to take-up displacement, as indicated in Fig. 18, a
reasonable correlation can be seen between the predicted and actual readings
with regards to the expected travel path. However, the theoretical analysis
overstated the magnitude of travel, probably because of the conservative
estimation of belt modulus. The start-up and shut-down times for a loaded belt
were 65 s and 44 s respectively. Although the start-up time is less than the
anticipated figure of 120 s, no dynamic problems have been experienced. The
lower start-up time was probably due to the reduced idler rolling resistance
coupled with the high power control levels selected in the PLC.
8. Award
The conveyor has been running successfully since being commissioned in
October 1992. In the first 7 months of operation, 500,000 t of coal were
conveyed to the RLT. This realised the intentions of the project planners in
transporting coal from the new Navigation Plant to the export terminal.
The conveyor system was recognised in August 1993 by receiving a 1993
Projects and Systems Award from the South African Institution of Mechanical
Engineers.
9. Conclusions
As part of the development of the new Landau Colliery, a 3.2 km overland
conveyor, with tight horizontal curves, was designed, commissioned and is
running successfully.
The static design and dynamic simulations were carried out within the
Anglo American Corporation of South Africa Limited. Arising from the dynamic
analysis, a number of changes were made to aspects of the conveyor
configuration to solve problems which arose.
Although a variable speed electrical drive was shown to be technically
suited to the conveyor, a fluid coupling was selected to control the belt
start-up. Additional inertia, in the form of drive flywheels, was added to
extend and control the belt shut-down.
Acknowledgements
The authors wish to thank the Anglo American Corporation of South Africa
Limited, and the Anglo American Coal Corporation (Amcoal), for permission to
publish this paper. The support of Mr. G.O. PARNELL, Consulting Engineer of Amcoal,
for this work is recognised.
The assistance of staff in both the AAC Mechanical Engineering and
Electrical Engineering Departments is gratefully acknowledged. Members of the
WITS Department of Electrical Engineering contributed to the assessment of the
electrical variable speed drive. Bateman Materials Handling Limited assisted in
the auditing and commissioning of the conveyor. The staff of the Navigation
Plant and the Rapid Loading Terminal cooperated with commissioning and field
testing. Surtees & Son (Pty) Ltd assisted in carrying out some of the test
runs with their measuring equipment.
The committee of the International Materials Handling Conference -
Beltcon 7, has given permission for this paper to be published in bulk
solids handling.
References
1.
PAGE, J.L. and SHORTT, G.G.:
Belt Conveyor Design Criteria within the Anglo American Corporation;
international Materials Handling Conference - Beltcon 6, 1991.
2.
SABS 1313: The Dimensions and
Construction of Conveyor Belt Idlers and Rolls.
Appendix
Final Specification of Conveyor:
|
Capacity |
design |
995 t/h |
|
|
Belt |
Speed |
3,57 m/s |
|
|
Motor |
type |
squirrel cage |
|
|
Fluid |
|
|
|
|
Additional |
|
|
|
|
Reducer |
type |
Flender FZG |
|
|
Holdback |
type |
Falk |
|
|
Take-up |
type |
gravity |
|
|
Pulleys |
face width |
1,100 mm |
|
|
Idlers |
nominal |
|
|
|
Nominal Idler |
|
||
|
Banking in Horizontal Curves |
|
||
|
|
carry: |
|
|
|
|
carry: |
|
|
|
|
return: |
|
|
|
|
|
|
|
|
Mr. J. L. Page, Mr. R. S. Hamilton and Mr. G. G.
Shortt Mr. P. Staples |
![]()