|
|
|
|
|
|
Information courtesy of ALSTOM.Electrical Machines - Questions and Answers
THREE PHASE INDUCTION MOTORS
1. What is the simplest form of motor?
The induction motor. Electrical energy supplied to the circuits of the stationary member (termed the stator) is transferred inductively to the circuits of the rotating member (termed the rotor). The rotor is arranged inside the stator, separated by a small air gap. No electric connection is necessary between the two sets of circuits.
2. How does the 3-phase induction motor operate?
The primary windings of the motor (usually arranged on the stator) are similar to the stator windings of an alternator. The alternator voltages are generated due to the rotation of its magnetic field, so that when these voltages are applied to the induction-motor windings, they result in a rotating magnetic field of a similar type to that which exists in the alternator. The secondary windings of the motor (usually located on the rotor) are acted upon by the rotating field to produce voltage, current and, as a consequence, mechanical torque, thus completing the transformation from electrical to mechanical energy.

Fig. 7 - Production of the rotating field in a three-phase induction motor.
3. How are the stator and rotor cores constructed?
Stator and rotor cores are built up from steel laminations with slots to receive the windings. The laminations are punched from high-quality electric sheet steel, about 0,5 mm thick and lightly insulated with varnish, china clay or similar material on one or both sides. The purpose of the lamination is to reduce to the minimum the eddy currents set up by the alternating magnetic field. Large stators are built up with segmental stamping for ease of handling.

Fig. 8 - Stator and rotor laminations.
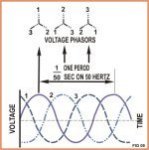
Fig. 9 - Phase-sequence of three-phase supply.
4. What is the basis of operation of all polyphase motors?
The rotating magnetic field set up when the primary windings of the motor are connected to an alternating-current supply.
5. What are the properties of this rotating magnetic field?
- Direction of rotation.
- Speed of rotation.
- Magnitude of the field - with constant voltage supply, this remains substantially constant in the working range of the motor between no-load and full-load.
6. On what does the direction of rotation of an induction motor depend?
On the phase sequence of the supply lines and the order in which these lines one connected to the stator
7. What is the phase sequence of the supply?
The order in which the line voltages, measured from the star point attain their immediately succeeding maximum value, of the same sign (either positive an negative). The British standard sequence of 3-phase supply is Li, L2 and L3, or red, yellow (or white) and blue.
8. How are the phases connected round the stator?
Round the stator we have three-phase groups of conductors. These groups follow the sequence U, V, W, if read in a certain way round (usually clockwise) and the sequence is repeated as many times as there are numbers of poles. If now L1, L2 and L3 of standard phase sequence are connected to phase named U, V and W respectively, the motor will rotate in the reverse direction to the sequence of the phase groups (anti-clockwise if the phase groups follow the sequence U, V and W when read in clockwise direction).
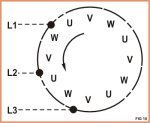
Fig. 10 - Line connection, phase groups and rotation of a three-phase four-pole induction motor.
Supply lines of standard phase sequence connected L1 to U, L2 to V and L3 to W phase groups. Rotation will be anticlockwise.9. How is the direction of rotation reversed?
The direction of rotation is reversed by changing over any two connections of the supply lines to the windings.
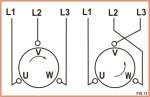
Fig. 11 - Reversing the direction of rotation.
The direction of rotation is reversed by changing over any two connections of the supply lines.
10. What determines the speed of the rotating field?
The number of poles in the motor, and the frequency of the supply according to the formula:-
Revolutions per minute = Supply frequency x 60 Number of pairs of poles This is termed the synchronous speed of the motor.
11. Does induction motor speed correspond to the synchronous speed?
No, the speed of the rotating member of an induction motor is always less than that of the rotating field.
12. Why does the rotor of an induction motor rotate at a lower speed than the speed of the rotating field?
To produce torque and therefore rotate, the rotor must be carrying a current. In the induction motor, this current arises in the rotor conductors because the rotating magnetic field cuts across and so generates voltages in them.
The closer the rotor speed approaches field speed, the slower the rate of cutting of the rotor conductors, the less the current induced in them and the smaller the torque produced. The consequence is that the rotor speed never reaches synchronous speed because at that speed no current would be flowing in the rotor conductors and therefore no torque would be produced.
The difference between synchronous speed and rotor speed is called the slip speed.
13. How is slip speed usually described?
Slip speed is usually expressed as a percentage (sometimes as a fraction) of the synchronous speed. If, for example a 6-pole 50-Hz motor is running at 900 r/min and the rotating field is moving at 1000 r/min, the speed of the motor relative to the field is 1000-900 r/min = 100 r/min, a slip speed of l0 percent of synchronous speed.
14. What is the size of the air gap between the stator and rotor?
It ranges from 1.25 mm, in small motors to 2.5 mm or more in large motors. The air gap is kept to the minimum possible for the reason that the more the gap the greater magnetizing force required to establish a magnetic flux in it. It is also necessary to keep the gap uniform, which accounts for much of the mechanical rigidity of the shaft, frame and bedplate in a well-designed motor.
15. What are two principal kinds of induction motor?
The squirrel-cage motor and the slip ring motor, depending on the type of rotor used.
16. How is the squirrel-cage rotor constructed?
In the squirrel-cage motor, the rotor winding consists of a series of bars of aluminium, copper on other conductor, usually uninsulated, accommodated in the rotor-core slots, all bars being completely short-circuited at each end by a conducting ring. The starting and running characteristics of the motor are fixed by the design of the rotor winding.
17. What type of rotor winding is used in a slip-ring motor?
In the slip-ring motor, the rotor has a winding very similar to that on the stator. The ends of the rotor winding are brought out to three slip rings, which allow the behavior of the motor to be altered by introducing resistance into the rotor circuit.
18. On what does the starting torque of a squirrel-cage motor depend?
On the design of its squirrel-cage rotor.
19. Why is the squirrel-cage motor the most widely used?
Because it is the simplest, cheapest and most robust type of motor and suitable for most drive requirements. Its rotor construction is without any slip-rings, commutator or brushes requiring maintenance.
20. What is the principal drawback of the squirrel-cage motor?
The starting (or standstill) current has a high value relative to the starting torque, although plain squirrel-cage motors are much improved in this compared with a few years ago.
Another way of looking at it is that the starting torque is low relative to the current taken by the stator. Typical starting values are 150 percent of full-load torque and 600 percent of full-load current. The stator current is at a low power factor of about 0.35 at standstill. These values vary quite a bit between small and large machines, the smaller one behaving better since the natural resistance of the windings is proportionally higher.
21. What is meant by the pull-out torque of an induction motor?
The critical point on the torque-speed curve where the torque starts to fall off sharply, known as the pull-out on maximum torque. If the motor is loaded beyond this point, it will no longer take the load and the speed will fall quickly to zero.
In the average induction motor this occurs at a laod of 2 or 2,5 times the normal full-load torque.
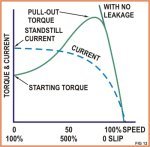
Fig. 12 - Rotor current-speed and torque-speed curves for a typical squirrel-cage motor.
Stator-current characteristics are very similar. Starting current (about six times-full-load current) is high relative to starting torque (about 200 per cent of full-load torque). Note maximum or pull-out torque which occurs at a load 2 to 2,5 times full-load value.
22. What sort of squirrel-cage rotor gives both high starting and high running efficiencies?
A rotor having two squirrel-cage windings or a single-cage operating on the current-displacement principle.
23. How does the double-cage rotor work?
The outer cage is of high resistance and current flowing in this provides time starting effort. The inner cage of relatively-low resistance carries little current during start (when time frequency is high), since it has a high reactance or choking effect due to the depth it is sunk in the rotor cone.
During starting, the current is displaced into the outer high-resistance case in greater or less degree according to design. As the rotor runs up to speed, the frequency of the currents in it decreases. The choking effect of the inner cage, being determined by the frequency, becomes less and less until at running speed it becomes very small indeed.
For example, in a 50-Hz motor with a pull-load slip of 2 percent, the starting frequency in the rotor is 50-Hz, whilst at speed the frequency is only 1. This being so, the rotor current at full-speed is distributed in the two cages according to the resistance, and the rotor behaves like a normal squirrel cage machine having the same total copper section.
In this way, a high-starting efficiency is obtained, due to the high-resistance outer cage acting more or less on its own, and a high running efficiency when the two cages are carrying current in parallel with consequent low resistance and small rotor loss.
24. What other squirrel-cage constructions give the current-displacement effect?
Two forms of single-cage construction are shown. By using deep bars for the rotor winding, a certain degree of current displacement is possible. For example with a bar 25 mm deep, the resistance at 50Hz (i.e. at start) is approximately 2.5 times the running value.
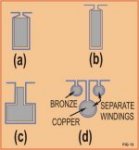
Fig. 13 - Types of squirrel-cage rotor conductors.
(a) Normal (b) Deep-bar
(c) Shah-bar (d) Double-cage.
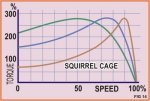
Fig. 14 - Torque-speed curves for various types of plain squirrel-cage motors.
The higher the resistance of the cage, the better the starting torque.
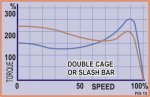
Fig. 15 - Typical torque-speed curves for double cage or sash-bar-cage motors.
By using a bar having an inverted T section or a sash-bar, the deep-bar effect is enhanced and considerably higher 50-Hz resistance values can be attained.
This simple and robust construction avoids the relative complication of the doublecage design and is sufficient to satisfy a large portion of the demand for the motors with high-starting efficiency.
25. What effect has the current displacement rotor on pull-out torque and running power factor?
Motors employing the current-displacement principle have a rather lower pull-out torque and lower running power factor than the corresponding plain squirrel-cage motor.
26. What is a dual-voltage motor?
An induction motor having its, nameplate stamped with two ranges of voltage (e.g. 220/248 and 380/420 volts) and having six terminals.
The motor would be connected in delta for the lower voltage range and in star for the higher voltage range. The connections for the lower-voltage range would be terminals U2, V2 and W2 to the supply while the following terminals would be joined: U2 and W1, V2 and U1, W2 and V1.
For the higher-voltage range, terminals U2, V2 and W2 would be connected to the supply and terminals U1, V1 and W1 would be joined for the star connection.

Fig. 16 - Dual-voltage induction motor.
Its three-phase windings are connected in 'delta' for operation on lower voltage and are connected in 'star' for higher voltage.
27. What is a high-slip motor?
A variation of the squirrel-cage motor having a high-resistance rotor. Instead of copper or aluminium for the rotor windings, a material of higher resistance is employed, such as bronze. The result is an increase in the starting torque per ampere and a greater reduction in speed or higher slip, with increase in load.
With a bronze rotor winding having twice the resistance of copper, the starting torque is nearly doubled for the same or slightly less, starting current than with a copper winding. At the same time, the running slip and the loss in the rotor is increased, resulting in a fall in efficiency and an increase temperature rise. Consequently, it is necessary to have a larger motor to carry the extra loss.
The slip-ring motor with its external rotor resistance permanently connected in circuits also acts as a high-slip motor. This is more efficient because the extra heat loss is largely dissipated outside the motor, enabling a smaller motor to be employed.
28. What are the applications of a high-slip motor?
Where the load is intermittent and comes on very sharply for brief periods, such as a punching machine.
A heavy flywheel is fitted in the drive, preferably between the work and any speed reduction gears. The flywheel shares the load with the motor, thus enabling a motor of lower rating to be employed.
For load sharing to take place automatically the motor speed should drop considerably as the load increases and this is ensured by using a motor having a high full-load slip, say 10 percent.
29. What are the effects of inserting resistance in the rotor circuit of an induction motor?
The motor speed can be varied by varying the amount of resistance, and the starting torque is improved.
30. Why does speed reduce when resistance is inserted in the rotor circuit?
Extra resistance in the rotor circuit means that it is necessary for a higher voltage to be generated across the windings than in the short-circuited rotor, in order to circulate the same current.
This voltage is only generated at a lower speed, that is, at a higher slip. In general, the insertion of a resistance across the slip-rings gives the torque required at a lower speed. In fact, when the total resistance in the rotor windings, including that of the winding itself is doubled, the slip at which full-load torque is obtained is also doubled.
31. Why is the starting torque improved when resistance is inserted in the rotor circuit?
Because of the increase of resistance compared with the reactance of the rotor windings. The rotor currents attain their maximum values more nearly coincident with the maximum values of the magnetic field producing them and consequently, at any given speed a much greater torque is obtained.
32. What are the disadvantages of using a slip-ring motor for speed control?
One disadvantage is that the efficiency is reduced when running with resistance across the slip rings. For example if the speed is reduced one-half, the efficiency is also halved, because half the power of the motor is wasted in the form of heat in the motor resistance.

Fig. 17 - Three-phase slip-ring motor connections.
The rotor windings are connected to slip rings, enabling resistance to be inserted in the rotor circuit. The variable external rotor resistors across the slip rings allow control of starting performance and speed.The second disadvantage is that if the load in removed the speed returns to nearly synchronous speed. Consequently with fluctuating load the motor speed rises and falls appreciably.
The energy losses when operating at reduced speeds are so considerable that the use of the slip-ring motor for obtaining speed variation is limited.
Their variable-speed application is generally confined to duties requiring operation at low speeds for only brief periods, such as for hoists, or where only a small speed variation is required, as in pump and fan drives, where the fluid or air delivery falls off quickly with a small reduction of speed.
33. How are slip rings arranged on the motor shaft?
Slip rings, usually of hard-wearing phosphor-bronze or copper-nickel, are shrunk onto a micanite insulated bush which is pressed on the motor shaft; in small motors a moulded type of insulation may be used for ease of production.
The rings may be mounted internally or externally to the motor bearing. When mounted externally, the leads from the rotor winding are carried through a hole drilled in the motor shaft.
Where possible, some degree of ventilation is given to the rings, the enclosing cover having small openings for this purpose. Totally-enclosed rings are desirable if working in an atmosphere laden with abrasive dust. Flameproof enclosure is specified when working in an explosive atmosphere.
34. How is brush gear for slip rings arranged?
Brushes consist of various special mixtures of copper or bronze and graphite. Pressure on the brushes is applied through spring fingers, usually arranged to lock back for ease in removing the brushes. Current from the brushes is carried by firmly-attached flexible leads.
In some cases, slip rings are arranged so that they are short-circuited after performing their starting function. One method of doing this is to use a short circuiting collar which rotates with, but is free to slide on the motor shaft, the collar being operated by a handle located on the outside of the housing.
In addition to short-circuiting gear, another feature sometimes specified is brush-lifting gear, which positively ensures that no brush wear occurs in the 'run' position. With brush-lifting gear it is usual for the short-circuiting handle to have an electrical contact interlocked with the rotor-resistance starter to make starting impossible unless the handle is in the correct position.
35. How are windings assembled in the slots?
The methods used for introducing the coils into the slots can be divided into two main classes: drop-in and push-through windings.
In the drop-in class, the individual wires of the coil side are dropped one or a few turns at a time into the slot through a relatively small opening (partially-closed slot). The slot insulation is then folded over and a wedge driven along the top of the slot to keep the conductors secure.

Fig. 18a - Drop-in windings.
There is a variation of this, used mainly for high-tension stators, where the coil is completely pre-formed with the slot insulation moulded round the coil legs. The mouth of the slot is practically as wide as the remainder (open slot). This method of winding has distinct merits in manufacture and repair, but requires careful design to compete in power factors and efficiency with a motor having partially-closed slots.
Push-through windings include bar windings and hairpin windings.
Push-through bar winding is made from straight copper strips with insulation on the slot-portion, forming a half coil. One end is bent to end-winding shape. The half-coil is then pushed through the slot, bent at the other end, and joined at both ends to the appropriate adjacent bars to form the winding.

Fig. 18b - Push-through windings.
The hairpin winding, which is an alternative to the open-slot winding for high-tension machines, consists of from 5 to 20 or more turns per coil. Each coil is pre-formed, cut through one end, insulated round the slot portion and bent to shape at one end. The two legs are then pushed through the slots and the coil ends formed on a block, to exact length and welded individually. They can also be joined by soldering clips.

Fig. 19 - Three-phase single-layer stator winding for six-pole motor.
A single-layer winding has one coil side in each slot, i.e. it has half as many coils as there are slots. The above winding has three slots per pole per phase, a total of 54 slots.36. What insulation is required in a motor?
- Covering for the conductors in the coils.
- Coil insulation in the slots comprising liners for the slots, and, if more than one coil side is laid in the slots, separators between coil sides.
- End-winding insulation, comprising tapes or separators.
- Varnish impregnation, filling spaces inside the slots, holding wires in place and excluding moisture and other contaminants.
37. How are the stator windings arranged in the slots?
The stator winding is rarely concentrated into one coil per pole in each phase, but is distributed in the slots around the stator in two or more coils per pole in each phase. There may be as many coils as there are slots, in the stator or, alternatively, only half as many coils as slots.
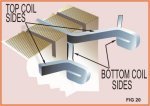
Fig. 20 - Arrangement of coils of double-layer winding.
In a double-layer winding, each slot contains two coil sides. Each coil has one side in the top ala slot and the other side in the bottom of a different slot.For the simpler case of half as many coils as there are slots, it will be a single-layer winding using one coil side to each slot, each coil spanning a number of slots equivalent to the pole pitch.
For the case where there are as many coils as there are slots, it will be a double-layer winding using two coil sides to each slot.
38. How are the end windings arranged?
The overhang of each coil at the ends of the stator core has to span a number of slots depending on the pole pitch. End windings have to be formed to do this while crossing over each other in the limited space available. There are a great number of ways in which the end windings can be arranged. The main types are shown in the accompanying diagrams.
Among the points to be considered are: ease of manufacture, accessibility for repair, provision of insulation clearances (especially in high-tension machines) and suitability for bracing against switching stresses. The last is particularly important for large-squirrel-cage motors or for any motors that are stopped or reversed by 'plugging'.
39. What types of wire insulation are commonly used?
Synthetic-enamel coverings are widely used on low voltage motors, while for high voltage synthetic-enamel plus varnished glass tape is normal.
40. If a motor is required to operate on a voltage different from that for which it was designed, what would it be necessary to do?
Alter the number of conductors per slot in the same ratio as the change in voltage. For example, to double the voltage, double the conductors per slot.
41. Is it possible to change the power of an induction motor?
In many cases, motors are designed so that their magnetic parts are approaching saturation and it will not be possible to increase the power except when converting totally-enclosed motors to the open type.
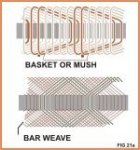
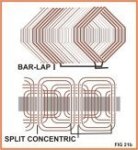
Fig. 21 - Ways in which coils can be arranged to give the necessary span.
The bar-wave and bar-lap windings are double-layer, the bottom coils sides being shown dotted. All the above windings are four slots per pale per phase.
 |
 |
The number of conductors per slot must be altered inversely as the square root of the power.
42. Is it practical to rewind an induction motor for the same power on a different frequency?
The conductors per slot are altered inversely as the change in frequency i.e. Conductors x Frequency = Constant.
In such cases however, the speed changes in proportion to the frequency and when rewinding for a lower frequency the reduced speed may mean that the cooling and the magnetic circuit is not adequate for the full power at the lower speed.
![]()