|
|
|
Electrical Machines - Questions and Answers
INTRODUCTION
What are the standard AC supply voltages in South Africa?
Electrical Machines - Questions and Answers
INTRODUCTION
What are the standard AC supply voltages in South Africa?
Fifty hertz 380, 433 or 525 volts, indicating 3-phase supply of these voltages for 3-phase Loads connected to the 3-phase lines. In the year 2004, voltage will change to a standard 400 volts.
What is the phase voltage?
The voltage between any phase wire of a 3-phase supply and the neutral wire.
What is the relationship between the phase voltage and the line voltage of a 3-phase 4-wire system?
Line voltage = 1.732 phase voltage.
What is meant by the torque of a motor?
The turning effort developed by the motor usually expressed in so many Newton meters (Nm). If the motor exerts a force of F(N) acting at right angles to a radius of r(m) from the centre of its pulley, the resulting torque is F x r(Nm).

Fig. 1 - The Torque Motor.
Torque is force (F) multiplied by the radius of action (r). If F is in newtons and r is in meters, the torque will be given in newton meters (Nm).How is the torque of a motor produced?
The production of torque requires the interaction of two sets of magnetic fields. The usual arrangement is for these fields to be produced by two sets of windings, both carrying current derived from the supply. One set of windings is situated on the stationary outer member (stator or field poles) and the other set on the rotating member (rotor or armature).
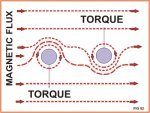
Fig. 2 - How the torque of a motor is produced.
The magnetic-field flux interacts with the magnetic flux due to the current flowing in the conductors of the coilThe principle is illustrated in the accompanying diagram. This shows a coil free to rotate about its axis in a magnetic field. If the coil is supplied with current, or a current is induced to flow in it, as indicated, the magnetic flux associated with this current will interact with the magnetic-field flux and produce a torque on each side of the coil. The coil consequently rotates, anti-clockwise in the case shown.

Fig. 3 - Conventional signs for magnetic polarity, direction of current and direction or rotation.
The magnetic lines of force are assumed to leave the face of a north pole

Fig. 4 - The direction of rotation of a motor is obtained by the use of Fleming's left-hand rule.
Direction of rotation depends on the direction of the main-field flux and the direction of the currents in the rotor or armature conductors.The principle is the same whether the current producing the two fields originate from AC or DC supplies. In the DC motor, the magnetic-field system is fixed and the current fed to the rotating armature coils is changed to alternating current in the coils by means of brushes and commutator.
In AC motors of the induction type, the stator windings are usually distributed in slots around the stator core, These windings ore connected to the supply and the rotating fold produced by them induces currents to flow in tie rotor.
What torque must I considered when driving a machine?
- The initial stoning (breakaway) torque needed to overcome he static friction of the driven machine and thus start it away from standstill.
- The accelerating torque needed to run the driven machine up to full speed.
- lb. running torque when full speed is reached,
NB: Ensure
- The run up (poll up) torque of the motor is not less than the torque required by the load.
- The max torque has sufficient overloud capacity (e.g.) presses
How can the initial starting torque needed far a drive, machine be found?
One method is to wrap o cord attached to o spring balance around the half-coupling or pulley of the driven machine
and to give o steady pull, noting the force required to start the shaft rotating. The starting torque required by the driven machine in Newton meters is equal to - Pull (It) x radius of half coupling or pulley (in)
An alternative method is to fix a bar along the horizontal diameter of the pulley and hang weights on the boy at known distance from the centre of the pulley until the pulley begins to turn.
How is the accelerating torque determined?
From the torque/speed curves of the motor and the load. The point at which he torque/speed curves interest will where the final running speed occurs. The motor torque available for accelerating the driven machine at a particular speed corresponds to the difference between motor torque and load torque at hot speed.
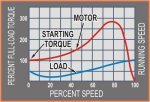
Fig. 5 - Torque/speed curves of a motor and its load.
The motor curve is for a squirrel-cage induction motor. The area between the two curves indicates the torque available to accelerate the load.What is meant by the power of the motor?
Its mechanical output or rote of doing work - the work it does per unit of time (per minute or second). The power rating of a motor is measured in watts, or more usually, kilowatts. Power was formerly measured in horsepower. 1 hp. z 746 watts.
How is the torque of a motor related to its power?
The motor exerts a force facing at right-angles to the radius, of its shaft or pulley. Its torque is force multiplied by radius (torque = F x r). The work the motor does in one revolution of the motor pulley is equal to the force exerted (F) multiplied by the circumference of the pulley (2πr). that is, F x 2πr.
The work done by the motor in one minute is its mechanical output or power and this is equal to work done per revolution x r/min, that is, - F x 2πr x r/min.
As we have already seen, F x r is the Torque, so work done per minute = mechanical output = 2πr x r/min x torque.
If torque is in Nm, the power in watts is obtained by dividing by 68, which gives Power of motor = {2π x torque (Nm) x r/min} / 60
What is meant by the time rating of a motor?
Some motors are required to carry full load all day, others to run only for a series of short periods on full load, say few minutes at a time. The less time a motor is actually in operation over a period, the more time it has to cool down between spells of operation and the smaller its frame size needs to be. It is economical in practice therefore to classify motors as to their time rating.
Various time ratings hove become standardized: maximum continuous rating, short time rating or some special rating based on a particular duty cycle. The manufacturer guarantees that the motor will not exceed a certain temperature often being run on full load for a certain length of time.
What is maximum continuous rating?
This is a statement of the bed and conditions assigned to the machine by the manufacturer at which the machine may be operated for an unlimited period.
What is short time rating?
This is again a statement of the load and conditions under which he machine may be operated but this time for a limited period only, starling at ambient temperature. There are several preferred periods for being 10, 30, 60 and 90 minutes.
For what type of applications does a short time rating apply?
Applications with fairly intermittent periods of operation, such as cranes, hoists, lifts and certain machine tools that are operated only infrequently.
What is meant by the temperature rating of a motor?
The rated output of a motor is controlled by a temperature fiat the winding insulation is capable of withstanding. The maximum-permissible-operating temperature depends on he type of insulation and the classifications in more general us are:
Class B - Polyester film, impregnated rayon, treated leatheroid.
Class F - Polyamide paper polyester film laminate treated terylene.
Class H - Polyamide pope,, treated glass fibre.How is the power required to drive an individual machine decided?
The power required is best obtained from the maker of the machine to be driven. In many applications the power required depends upon the efficiency of the driven machine and this can only be estimated by its manufacturer. This particularly applies to pumps, compressors, generators, centrifugal separators and fans.
For driving machine tools, the required power is increased for heavy duty and rapid production and reduced when only light work is the rule.
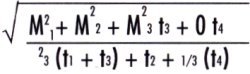
What calculation is commonly used to determine the minimum power required when the loads to be driven vary over a particular work cycle?
The minimum power required to avoid overheating is determined approximately by the root-mean-square method: Power =
Where P1, P2, P3, etc. are the powers required during the duty cycle and t1, t2, t3, etc. are the periods of time in minutes corresponding to the above power demands.
How is power decided for driving a line-shaft belt to a group of machines?
If there is a sufficient number of machines, say six or more, and these are hand controlled so that there are pauses during which no work is being done, such as for setting up, the motor speed will seldom exceed half the sum of the requirements of the driven machines. A more powerful motor will be necessary when the driven machines are on full-capacity work all the time.
What is the power required for driving cranes, hoists and winches?
Power (in watts) =
9.81 x kg lifted x lifting speed in m/s Efficiency of mechanical parts An efficiency of about 0.70 may be assumed for worm and spur gear or 0.65 if a stage of friction gearing is incorporated as in a frictional hoist. These are average figures that may be exceeded in certain favourable cases. On the other hand they may easily be less, requiring more power if the gear train consists of many stages or if badly cut or worn or if cast gears are employed.
How is current required to supply a 3-phase motor at full-load calculated?
From details of power, efficiency and power factor The current is equal to:
Watts x 1 00
1.732 x line voltage x % efficiency x power factor How is the full-load current of a single-phase motor arrived at?
From the formula
Currents = Watts x 100 Voltage x %FFF x PF HOW IS THE FULL-LOAD CURRENT OF A DC MOTOR CALCULATED?
From the formula
Watts x 1 00 = Current Voltage x % efficiency What is Power factor?
The factor or percentage of the current in an AC circuit that is supplied in the form of energy the remaining current being idle.
This idle current is termed reactive current or wattless current. The power factor of a circuit is calculated from: kW/kVA
If on induction motor is described as having a power factor of 80 percent on 0.8, what does this mean?
That 80 percent of he motor current at full load is power current doing work, and 20 percent is idle. A kVA demand meter on an ammeter will register the full 100 percent of current but a wattmeter will take into account only the true energy component of the current, namely 80 per cent.
An additional point about an induction motor is that the idle or wattless current is lagging.
How does lagging wattless current arise?
Every induction motor (or transformer or other electric apparatus comprising coils of wire embedded in on surrounding an iron cone) constitutes an inductive reactance. If the motor is switched on to an AC supply, whether it does useful work on not, a current is taken from the system to excite it. This current is 90 degree lagging in phase on the voltage and is reactive current or so-called idle or wattless current. The only energy in this current is fiat required to overcome the losses and is but a small fraction of the total.
When the motor is put to work, it will take, in addition to its excitation current, a power on energy current according to the amount of work to be done and the efficiency loss in the motor. The proportion of the two currents varies according to the percentage load on the motor. Consequently, the nearer the motor runs to full power the greeter will be the proportion of power current to idle current, i.e. the higher the power factor.
What is meant by power factor correction?
Excitation current is on essential feature of AC induction motors (and other AC inductive apparatus). The demand for excitation current exists whether the motor runs loaded or light. If this current circulates back and forth in the supply system, the supply cables, alternators and other equipment have to be designed to carry it and the additional expense involved is passed on to the consumer in higher price per kW, A low power factor on the supply involves the locking up of capital by the supply authority in order to carry heavy idle current. However, the user can arrange to reduce the excitation currents carried by the supply by improving the power factor of his installation. To enable supply authorities to turn idle capital into revenue-producing capital, they offer a tariff that in effect gives a substantial bonus to those consumers who improve the power factor of their load.
How can power factor he improved?
By the installation of static capacitors, by the provision of DC exciters as used in synchronous motors, on by the use of compensated motors on rotary phase-advancers. These provide the necessary excitation current for the motors and thus relieve the supply system of a portion on the whole of he wattless lagging current (see Fig, 6).
Why can a capacitor be used for improving the power factor?
Introducing inductance into an AC circuit causes the current to reach us maximum value later than the voltage. Introducing capacitance into an AC circuit causes the current to attain its maximum value earlier than the voltage. Therefore, by adding a suitable capacitor to an inductive circuit the time lag con be reduced by any desired amount.
Where are capacitors placed in an installation?
The installation of a capacitor has the effect of decreasing the current taken from the supply but does not decrease the excitation current actively circulating round the capacitor-motor circuit.
Theoretically, therefore, the best position for a capacitor is as near as possible to the motor, that is directly across the motor terminals, thus allowing the use of a smaller size feeder owing to the reduced current taken from the supply. However, it is not generally an economic arrangement to correct the power factor of each motor in on installation individually, unless they are large motors. This is because of the relatively high cost per kVA of capacitors in small sizes. It is often desirable to group small motors together for correction with a moderately-sized capacitor whose cost would be much less than a number of small capacitors of the some total kVA. The connective equipment in such cases is installed either in groups distributed about the internal supply system on, in small compact installations in a block connected at on near the point of supply. When a capacitor is individually connected to a motor, it is controlled by the same switch as the motor so that it is always brought into service when required. Group or block connection of capacitors may require some method of control, as capacitance must be taken out of service when not required. The best type of control is automatic control.
 |
NB: If capacitors are connected directly across the motor terminals, then the capacitors KVAR must not exceed 85% of the no load KVA of the motor, without reference to the motor manufacturer |
Fig. 6 - Capacitor connections for individual power-factor control of induction motors.
Connection of the capacitors through fuses is preferred for protection and isolation. Fuse rating approximately 50 percent higher than capacitor current. Connections shown across the terminals of the star-delta starter allow power-factor improvement during starting as well as running.
How is the insulation resistance of a motor winding checked?
With a 500 volt insulation-resistance tester. The insulation resistance in megohms should not be less than
Motor rated voltage
1000 + rated kVA
If insulation resistance is low, what Is the most likely cause?
The presence of water in the windings.
How can motor windings he dried out?
By placing the armature on stator concerned (not the complete machine) in an oven for about 12 hours at a temperature of 100-120°C. After the windings have cooled, the insulation should be rechecked.
What is the purpose of the motor enclosure?
To protect the windings and bearings from the abrasive, destructive on corrosive effects of dust, liquid or gas in the surrounding atmosphere. A motor with inadequate protection will have its life greatly curtailed.
What is the effect of dust on the windings?
The ventilation of the motor may ho impeded and will tend to overheat. If the dust is abrasive it will become embedded in the insulation and result in short circuits.
THREE PHASE INDUCTION MOTORS
What is the simplest form of motor?
The induction motor. Electrical energy supplied to the circuits of the stationary member (termed the stator) is transferred inductively to the circuits of the rotating member (termed the rotor). The rotor is arranged inside the stator, separated by a small air gap. Ho electric connection is necessary between the two sets of circuits.
How does the 3-phase induction motor operate?
The primary windings of the motor (usually arranged on die stator) are similar to the stator windings of an alternator The alternator voltages are generated due to the notation of its magnetic field, so that when these voltages are applied to the induction-motor windings, they result in a rotating magnetic field of a similar type to that which exists in the alternator The secondary windings of the motor (usually located on the rotor) are acted upon by the notating field to produce voltage, current and, as a consequence, mechanical torque, thus completing the transformation from electrical to mechanical energy.

Fig. 7 - Production of the rotating field in a three-phase induction motor.
How an the stator and rotor cores constructed?
Stator and rotor cones are built up from steel laminations with slots to receive the windings. The laminations are punched from high-quality electric sheet steel, about 0,5 mm thick and lightly insulated with varnish, china clay or similar material on one or both sides. The purpose of the lamination is to reduce to the minimum the eddy currents set up by the alternating magnetic field. Large stators are built up with segmental stamping for ease of hand.

Fig. 8 - Stator and rotor laminations.
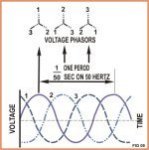
Fig. 9 - Phase-sequence of three-phase supply.
What is the basis of operation of all polyphase motors?
The rotating magnetic field set up when the primary windings of the motor ore connected to an alternating-current supply.
What are the properties of this rotating magnetic field?
- Direction of rotation
- Speed of rotation.
- Magnitude of the field - with constant voltage supply, this remains substantially constant in the working range of the motor between no-load and full-load.
On what does the direction of rotation of an induction motor depend?
On the phase sequence of the supply lines and the order in which these lines one connected to the stator
What is the phase sequence of the supply?
The order in which the line voltages, measured from the star point attain their immediately succeeding maximum value, of the same sign (either positive an negative), The British standard sequence of 3-phase supply is Li, L2 and L3, or red, yellow (or white) and blue.
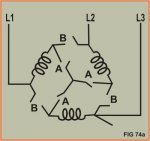
How are the phases connected round the stator?
Round the stator we have three-phase groups of conductors. These groups follow the sequence U, V, W, if read in a certain way round (usually clockwise) and the sequence is repeated as many times as there are numbers of poles. If now L1, L2 and L3 of standard phase sequence are connected to phase named U, V and W respectively, the motor will notate in the reverse direction to the sequence of the phase groups (anti-clockwise if the phase groups follow the sequence U, V and W when read in clockwise direction).
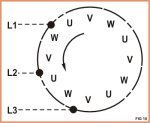
Fig. 10 - Line connection, phase groups and rotation of a three-phase four-pole induction motor.
Supply lines of standard phase sequence connected L1 to U, L2 to V and L3 to W phase groups. Rotation will be anticlockwise.How is the direction of rotation reversed?
The direction of rotation is reversed by changing over any two connections of the supply lines to the windings.
What determines the speed of the rotating field?
The number of pales in the mob, and die frequency of the supply according to the formula:
Revolutions per minute = Supply frequency x 60 Number of pairs of poles This is termed the synchronous speed of the motor.
Does induction motor speed correspond to the synchronous speed?
No the speed of the rotating member of an induction motor is always less than that of the rotating field.
Why does the rotor of an induction motor rotate at a lower speed than the speed of the rotating field?
To produce torque and therefore rotate, the rotor must be carrying a current. In the induction motor, this current arises in he rotor conductors because the rotating magnetic field cuts across and so generates voltages in them. The closer the rotor speed approaches field speed, the slower the rate of cutting of the rotor conductors, the less the current induced in them and the smaller the torque produced. The consequence is that the rotor speed never reaches synchronous speed because at that speed no current would be flowing in the rotor conductors and therefore no torque would be produced.
The difference between synchronous speed and rotor speed is called the slip speed.
How is slip speed usually described?
Slip speed is usually expressed as a percentage (sometimes as a fraction) of the synchronous speed. If, for example a 6-pole 50-Hz motor is running at 900 r/min and the rotating field is moving at 1000 r/min, the speed of the motor relative to the field is 1000-900 r/min = 100 r/min, a slip speed of l0 percent of synchronous speed.
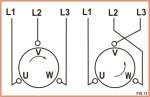
Fig. 11 - Reversing the direction of rotation.
The direction of rotation is reversed by changing over any two connections of the supply lines.What is the size of the air gap between the stator and rotor?
It ranges from 1.25 mm, in small motors to 2.5 mm on more in large motors, The air gap is kept to the minimum possible for time reason that the more the gap the greater magnetizing force required to establish a magnetic flux in it. It is also necessary to keep the gap uniform, which accounts for much of the mechanical rigidity of the shaft, frame and bedplate in a well-designed motor.
What are two principal kinds of induction motor?
The squirrel-cage motor and the slip ring motor, depending on the type of rotor used.
How is the squirrel-cage rotor constructed?
In the squirrel-cage motor, the rotor winding consists of a series of bars of aluminium, copper on other conductor, usually uninsulated, accommodated in the rotor-core slots, all bars being completely short-circuited at each end by a conducting ring. The starting and running characteristics of the motor are fixed by time design of the rotor winding.
What type of rotor winding is used in a slip-ring motor?
In the slip-ring motor, the rotor has a winding very similar to that on the stator. The ends of the rotor winding are brought out to three slip rings, which allow the behavior of the motor to be altered by introducing resistance into the rotor circuit.
On what does the starting torque of a squirrel-cage motor depend?
On the design of its squirrel-cage rotor.
Why is the squirrel-cage motor the most widely used?
Because it is the simplest cheapest and most robust type of motor and suitable for most drive requirements. Its rotor construction is without any slip-rings, commutator or brushes requiring maintenance.
What is the principal drawback of the squirrel-cage motor?
The starting (or standstill) current has a high value relative to the starling torque, although plain squirrel-cage motors are much improved in this compared with a few years ago.
Another way of looking at it is that the starting torque is low relative to the current taken by the stator. Typical starting values are 150 percent of full-load torque and 600 percent of full-load current. The stator current is at a low power factor of about 0.35 at standstill. These values vary quite a bit between small and large machines, the smaller one behaving better since the natural resistance of the windings is proportionally higher.
What is meant by the pull-out torque of an induction motor?
The critical point an the torque-speed curve where the torque starts to fall off sharply known as the pull-out on maximum torque. If the motor is loaded beyond this point, it will no longer take the load and the speed will fall quickly to zero. In the average induction motor this occurs at a land of 2 or 2,5 times the normal full-load torque.
What sort of squirrel-cage rotor gives both high stoning and high running efficiencies?
A rotor having two squirrel-cage windings or a single-cage operating on the current-displacement principle.
How does time double-cage rotor work?
The outer cage is of high resistance and current flowing in this provides time starting effort. The inner cage of relatively-low resistance carries little current during start (when time frequency is high), since it has a high reactance or choking effect due to the depth it is sunk in the rotor cone. During starting, the current is displaced into the outer high-resistance case in greater or less degree according to design. As the rotor runs up to speed, the frequency of the currents in it decreases. The choking effect of time inner cage, being determined by the frequency, becomes less and less until at running speed it becomes very small indeed.
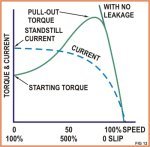
Fig. 12 - Rotor current-speed and torque-speed curves for a typical squirrel-cage motor.
Stator-current characteristics are very similar. Starting current (about six times-full-load current) is high relative to starting torque (about 200 per cent of full-load torque). Note maximum or pull-out torque which occurs ala load 2 to 2,5 times full-load value.For example, in a 50-Hz motor with a hill-load slip of 2 percent, the starting frequency in the rotor is 50-Hz, whilst at speed the frequency is only 1. This being so, the rotor current at full-speed is distributed in the two cages according to the resistance, and the rotor behaves like a normal squirrel cage machine having the same total copper section.
In this way, a high-starting efficiency is obtained, doe to the high-resistance outer cage acting more on less on its own, and a high running efficiency when the two cages are carrying current in parallel with consequent low resistance and small rotor loss.
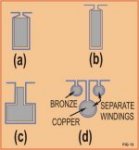
Fig. 13 - Types of squirrel-cage rotor conductors.
(a) Normal (b) Deep-bar
(c) Ash-bar (d) Double-cage.
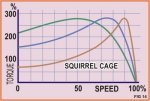
Fig. 14 - Torque-speed curves for various types of plain squirrel-cage motors.
The higher the resistance of the cage, the better the starting torque.
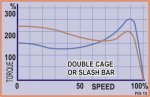
Fig. 15 - Typical torque-speed curves for double cage or sash-bar-cage motors.
What other squirrel-cage constnuc6ons give the current-displacement effect?
Two forms of single-cage construction are shown. By using deep bars for the rotor winding, a certain degree of current displacement is possible. For example with a bar 25 mm deep, the resistance at 50Hz (i.e. at start) is approximately 2.5 times the running value. By using a bar having an inverted T section or a sash ban, the deep-bar effect is enhanced and considerably higher 50-Hz resistance values can be attained. This simple and robust construction avoids the relative complication of the doublecage design and is sufficient to satisfy a large portion of the demand for the motors with high-starting efficiency.
What effect has the current displacement rotor on pull-out torque and running power factor?
Motors employing the current-displacement principle have a rather lower pull-out torque and lower running power, factor than the corresponding plain squirrel-cage motor.
What is a dual-voltage motor?
An induction motor having it, nameplate stomped with two ranges of voltage (e.g. 220/248 and 380/420 volts) and having six terminals.
The motor would be connected in delta for time lower voltage range and in star for the higher voltage range. The connections for time lower-voltage range would be terminals U2, V2 and W2 to the supply while the following terminals would be joined: U2 and W1, V2 and U1, W2 and V1. For the higher-voltage range, terminals U2, V2 and W2 would be connected to the supply and terminals U1, V1 and W1 would be joined far the star connection.
What is a high-slip motor?
A variation of the squirrel-cage motor having a high-resistance rotor; instead of copper an aluminium for time rotor windings, a material of higher resistance is employed, such as bronze. The result is an increase in the starting torque per ampere and a greater reduction in speed, an higher slip, with increase in load.

Fig. 16 - Dual-voltage induction motor.
Its three-phase windings are connected in delta for operation on lower voltage and are connected in the star for higher voltage.With a bronze rotor winding having twice the resistance of copper, the starling torque is nearly doubled for the see, on slightly less, starting current than with a copper winding. At the same time, the running slip and the loss in the rotor is increased, resulting in a fall in efficiency and an increase temperature rise. Consequently, it is necessary to have a larger motor to carry the extra loss.
The slip-ring motor with its external rotor resistance permanently connected in circuits also acts as a high-slip motor. This is more efficient because the extra heat loss is largely dissipated outside the motor, enabling a smaller motor to be employed.
What are the applications of high-slip motor?
Where the load is intermittent and comes on very sharply for brief periods, such as a punching machine. A heavy flywheel is fitted in the drive, preferably between time work and any speed reduction gears. The flywheel shares the end with the motor, thus enabling a motor of lower rating to be employed. For load sharing to take place automatically the motor speed should drop considerably as the load increases and this is ensured by using a motor having a high full-load slip, say 10 percent.
What are the effects of inserting resistance in the rotor circuit of an induction motor?
The motor speed can be varied by varying the amount of resistance, and the starling torque is improved.
Why does speed reduce when resistance is inserted in the rotor circuit?
Extra resistance in the rotor circuit means that it is necessary for a higher voltage to be generated across the windings than in the short-circuited rotor in order to circulate the seine current. This voltage is only generated at a lower speed, that is, at a higher slip. In general, the insertion of a resistance across the slip-rings gives the torque required at a lower speed. In fact, when the total resistance in the rotor windings, including that of the winding itself, is doubled, the slip at which full-load torque is obtained is also doubled.
Why is the starting torque improved when resistance is inserted in the rotor circuit?
Because of the increase of resistance compared with the reactance of the rotor windings. The rotor currents attain their maximum values more nearly coincident with the maximum values of the magnetic field producing them and, consequently, at any given speed a much greater torque is obtained.
What are the disadvantages of using a slip-ring motor for speed control?
One disadvantage is that the efficiency is reduced when running with resistance across the slip rings. For example if the speed is reduced one-half, the efficiency is also halved, because half the power of the motor is wasted in the form of heat in the motor resistance.

Fig. 17 - Three-phase slip-ring motor connections.
The rotor windings are connected to slip rings, enabling resistance to be inserted in the rotor circuit. The variable external rotor resistors across the slip rings allow control of starting performance and speed.The second disadvantage is that if the load in removed the speed returns to nearly synchronous speed. Consequently with fluctuating load the motor speed rises and falls appreciably.
The energy losses when operating at reduced speeds are so considerable that the use of the slip-ring motor for obtaining speed variation is limited.
Their variable-speed application is generally confined to duties requiring operation at low speeds far only brief periods, such as for hoists, or where only a small speed variation is required, as in pump and fan drives, where lime fluid or air delivery falls off quickly with a small reduction of speed.
How are slip rings arranged on the motor shaft?
Slip rings, usually of hard-wearing phosphor-bronze or copper-nickel, are shrunk onto a micanite insulated bush which is pressed on the motor shaft; in small motors a moulded type of insulation may be used for ease of production.
The rings may be mounted internally or externally to the motor hearing. When mounted externally, the leads from the rotor winding are carried through a hole drilled in the motor shaft.
Where possible, same degree of ventilation is given to the rings, the enclosing cover having small openings for this purpose. Totally-enclosed rings ore desirable if working in an atmosphere laden with abrasive dust. Flameproof enclosure is specified when working in an explosive atmosphere.
How is brush gear for slip rings arranged?
Brushes consist of various special mixtures of copper or bronze and graphite. Pressure on the brushes is applied through spring fingers, usually arranged to lock back for ease in removing the brushes. Current from the brushes is carried by firmly-attached flexible leads.
In some cases, slip rings are arranged so that they are short-circuited after performing their starting function. One method of doing this is to use a short circuiting collar which rotates with but is free to slide on the motor shaft, the collar being operated by a handle located on the outside of the housing.
In addition to short-circuiting gear, another feature sometimes specified is brush-lifting gear, which positively ensures that no brush wear occurs in the 'run' position. With brush-lifting gear it is usual for the short-circuiting handle to have an electrical contact interlocked with the rotor-resistance starter to make starting impossible unless the handle is in the correct position.
How are windings assembled in the slots?
The methods used for introducing the coils into the slots can be divided into two main classes: drop-in and push-through windings.
In the drop-in class, the individual wires of the coil side are dropped one or a few turns at a time into the slot through a relatively small opening (partially-closed slot). The slot insulation is then folded over and a wedge driven along the top of the slot to keep the conductors secure.
There is a variation of this, used mainly for high-tension stators, where the coil is completely pre-formed with the slot insulation moulded round the coil legs. The mouth of the slot is practically as wide as the remainder (open slot). This method of winding has distinct merits in manufacture and repair, but requires careful design to compete in power factors and efficiency with a motor having partially-closed slots.

Fig. 18a - Drop-in windings.

Fig. 18b - Push-through windings.
Push-through windings include bar windings and hairpin windings.
Push-through bar winding is mode from straight copper strips with insulation on the slot-portion, forming a half coil. One end is bent to end-winding shape. The half-coil is then pushed through the slot, bent at the other end, and joined at both ends to the appropriate adjacent bars to form the winding.
The hairpin winding, which is an alternative to the open-slot winding for high-tension machines, consists of from 5 to 20 or more turns per coil. Each coil is pre-formed, cut through one end, insulated round the slot portion and bent to shape at one end. The two legs are then pushed through the slots and the coil ends formed on a block, to exact length and welded individually. They can also be joined by soldering clips.

Fig. 19 - Three-phase single-layer stator winding for six-pole motor.
A single-layer winding has one coil side in each slot, i.e. it has half as many coils as there are slots. The above winding has three slots per pole per phase, a total of 54 slots.What insulation is required in a motor?
1. Covering for the conductors in the coils.
2. Coil insulation in the slots comprising liners for the slots, and, if more than one coil side is laid in the slots, separators between coil sides.
3. End-winding insulation, comprising tapes or separators.
4. Varnish impregnation, filling spaces inside the slots, holding wires in place and excluding moisture and other contaminants.How are the stator windings arranged in the slots?
The stator winding is rarely concentrated into one coil per pole in each phase, but is distributed in the slots around the stator in two or more coils per pole in each phase. There may be as many coils as there are slots, in the stator or, alternatively, only half as many coils as slots.
For the simpler case of half as many coils as there are slots, it will be a single-layer winding using one coil side to each slot, each coil spanning a number of slots equivalent to the pole pitch.
For the case where there are as many coils as there are slots, it will be a double-layer winding using two coil sides to each slot.How are the end windings arranged?
The overhang of each coil at the ends of the stator core has to span a number of slots depending on the pole pitch. End windings have to be formed to do this while crossing over each other in the limited space available. There are a great number of ways in which the end windings con be arranged. The main types are shown in the accompanying diagrams.
Among the points to be considered are: ease of manufacture, accessibility for repair, provision of insulation clearances (especially in high-tension machines) and suitability for bracing against switching stresses. The last is particularly important for large-squirrel-cage motors or for any motors that are stopped or reversed by 'plugging'.
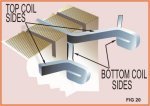
Fig. 20 - Arrangement of coils of double-layer winding.
In a doable-layer winding, each slot contains two coil sides. Each coil has one side in the top ala slot and the other side in the bottom ala different slot.What types of wire insulation are commonly used?
Synthetic-enamel coverings are widely used on low voltage motors, while for high voltage synthetic-enamel plus varnished glass tape is normal.
If a motor is required to operate on a voltage different from that for which it was designed, what would it be necessary to do?
Alter the number of conductors per slot in the same ratio as the change in voltage. For example, to double the voltage, double the conductors per slot.
Is it possible to change the power of an induction motor?
In many cases, motors are designed so that their magnetic parts are approaching saturation and it will not be possible to increase the power except when converting totally-enclosed motors to the open type.
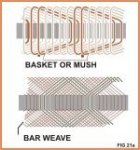
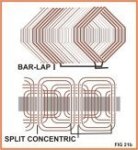
Fig. 21 - Ways in which coils can be arranged to give the necessary span.
The bar-wave and bar-lap windings are double-layer, the bottom coils sides being shown dotted. All the above windings are four slots per pale per phase.
 |
 |
The number of conductors per slot must be altered inversely as the square root of the power.
Is it practical to rewind an induction motor for the same power on a different frequency?
The conductors per slot are altered inversely as (ie conductors x frequency = constant) the change in frequency. ie Conductors x Frequency Constant. In such cases, however, the speed changes in proportion to the frequency and when rewinding for a lower frequency the reduced speed may mean that the cooling and the magnetic circuit are not adequate for the full power on the lower speed.
INDUCTION MOTOR CONTROL GEAR
What are the main functions of control gear?
- To provide a means of starting and stopping the motor and, at the same time, of limiting the starting current if required.
- To give adequate protection of the motor under all conditions.
- To allow speed changing when required.
- To provide means of braking the motor when required.
- To reverse the direction of rotation when required.
Protection of the motor must be automatic, but the other operations may be arranged to be under the control of an operator, or may be partly or fully-automatic.
What devices are required to give adequate protection to the motor?
- Under-voltage release to prevent automatic restarting after a stoppage due to a drop in voltage or failure of the supply, where unexpected restarting of the motor might cause injury to an operator.
- Overload relays for protection against excessive current in the motor windings - e.g. in the event of overload or failure of the motor.
- Earth fault.
- Single phase protection
What provision must be made for short-circuit conditions in motor circuits?
Since overload relays are not designed to operate and clear the circuit in the event of a short-circuit, circuit-breaker or fuse protection of sufficient breaking capacity to deal with any possible short-circuit that may occur must be provided.
What are the usual forms of overload relay in motor-control gear?
In small contactor starters, generally thermal relays, either of the 'solder pot' or bimetal type. With large contactors or oil switches magnetic relays of the solenoid type with dashpots. Either type of overload relay may be used within intermediate sizes.
How do thermal relays work?
The bimetallic thermal relay consists of a small bimetallic strip that is heated by an element connected in series with the supply. When the current rises above a preset value, the movement of the strip releases a catch which opens the trip contacts. In recent years more modern electronic relays are used which simulate the thermal overload. Many of these relays also incorporate a memory, i.e. simulates the temperature rise cooling curve of the winding.
How does the magnetic overload relay operate?
A solenoid connected in series with the supply contains a plunger whose movement is damped by a dashpot. When the safe current is exceeded, the solenoid pulls the plunger up - disconnecting the supply. The damping provided by the dashpot prevents unwarranted tripping on short-time overloads.
How many overload relays are required in the control gear?
On three-phase supplies where the neutral point of the system is connected to earth, as is usually the case, three overload relays one in each line are necessary far complete protection. For 2-phase 3-wire and 4-wire supplies two overload relays are required, one in each phase line, none being connected in any neutral or earth conductor. With single-phase motors one overload relay in any conductor except an earthed conductor or neutral.
What happens when one of the three lines supplying a three-phase induction motor becomes open-circuited?
The motor, if already running, will continue to run as a single-phase motor on the remaining single-phase supply. The condition is called single-phasing. If the motor is loaded to more than about 30 per cent of full load, the currents in the motor windings tend to become excessive and overheating occurs. With one line broken, the motor will not start up and, due to the heavy standstill current, burn-out is likely unless the motor is quickly disconnected.
What currents flow in a single-phasing delta-connected motor?
Assuming that supply line Li is open circuited, as shown, typical line and phase currents, given as percentages of normal full-load three-phase current, at various loads will be
| Percentage of full load current at | |||
| 1/2 Load | 3/4 Load | Full Load | |
| Lines L2 and L3 | 98 | 155 | 250 |
| Phase W | 118 | 187 | 285 |
| Phases U and V | 55 | 90 | 147 |
Thus, phase W connected across the two operative lines carries nearly three times normal current under single-phasing conditions at full load, while phases U and V, which ore in series, carry more than full-load current.
What currents flow in a single-phasing star-connected motor?
Assuming that line Li is open-circuited, as shown, the current flowing at full load in lines L2 and L3 and through the two phases in series will be of the order of 250 percent of normal full-load current, 155 per cent on 3/4-load and 98 per cent on 1/2-load.
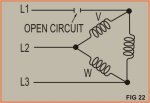
Fig. 22-Open-circuited supply line of delta-connected motor.
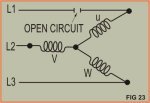
Fig. 23- Open-circuited supply line of star-connected motor.
Will normal overload relays trip on single-phasing?
If correctly set, the normal overloads will trip when the motor is fully loaded due to the rise in current passing through the closed supply lines. With a delta-connected motor partially loaded, the rise in line current may not be sufficient to operate the overload trip and one phase may became excessively overheated.
What special protection can be provided against single-phasing?
One method is to incorporate a combined overload and single-phase relay in the control gear. A typical relay of this type includes three overload relays with trip contacts so arranged that it will trip if the displacement of one overload element differs from that of the others.
This type of relay will operate if single-phasing occurs at or near full load with the same time delay as on overload, but at light loads, the time delay for single-phase protection is longer. Another device is a phase-failure relay in the control gear. Its principle is based on the fact that the currents in the supply lines or the voltages between them at the motor terminals are unbalanced when the motor is single-phasing. The phase-failure relay may be of the current or voltage-operated type which trips out the line switch when one of the supply lines becomes open circuited.
What are the alternatives to the use of overload releases?
Direct protection against overheating or burning-out of motor windings may be built into the motor. Built-in protectors may take the form of thermostats or thermistors embedded in the end windings of the stator while the motor is under construction. These devices are sensitive to the winding temperatures and are arranged in a suitable circuit so as to cause the motor to be switched off if the windings heat up excessively.
How are built in thermal overload protector arranged?
On smaller motors LV mush winding motors these detectors are embedded in the overhang of the winding. On the medium voltage motors these are placed in between bottom and top coils in the slot portion of the core.
How do built in thermal overload protectors work?
Thermistors are very small semiconductor devices whose resistance changes rapidly with temperature. Three thermistors are inserted in the end-windings of the stator, one in each phase, and are connected series. The two thermistor terminals at the motor are connected to an electronic-amplifier-control unit in the starter, through which the tripping circuit of the starter is operated. The response of the thermistors to temperature change is extremely rapid, allowing this type of protection to be effective under all motor overload conditions.
Resistance temperature devices (RTD)
This is a resistance which increases linearly with temperature rise. The most commonly used in motors is embedded in an epoxy glass type wedge which can be inserted between the upper and lower coils. The resistance is measured with an electronic amplifier control unit which is converted to temperature.
This unit has adjustable settings to allow for alarm and trip with contacts which are then used in the motor starter circuit.
Thermocouples
Thermocouple is two dissimilar metals which joined together and with change in temperature creates a voltaic action. This gives out a milli-volt signal which is then measured with an electronic amplifier control unit converting the measurement to temperature.
When is direct-on-line starting used for three-phase squirrel-cage motors?
It is usual for small LV machines; for larger motors it is often necessary to use other methods of starting in order to ovoid excessive starting currents. HV motors are usually dol started. (since amps are low)
What are the connections for direct-on-line starters?
The scheme of connections is merely three line leads in and three motor leads out. Direct-on-line contactor starters are designed round the basic circuit shown. An isolating switch may be incorporated in the starter. If reversing is required, two contactors one for each rotation, are required and are interlocked so that only one can close at a time.
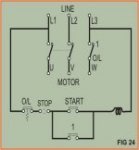
Fig. 24 - Bask circuit of direct-on-line contactor starter for squirrel-cage motor.
1 indicates the contactor coil and the contacts operated by it when it is energized.

Fig. 25 - Connection diagram for dire ct-online contactor starter.
A hand-operated oil switch with under-voltage trip coil may be used with larger motors.
What methods are employed to reduce the starting current of squirrel-cage motors?
Where the starting conditions are light, the starting current can be lessened by some method of reducing the stator voltage when switching on. There are four ways of starting on reduced voltage:
- Primary-resistance starting -introducing resistance between the supply and the stator windings.
- Primary-reactor starting -introducing a reactor in series with the stator windings, usually connected in the star point.
- Star-delta starting - connecting the stator windings in star for starting and in delta for running.
- Auto-transformer starting -supplying the stator windings through toppings on an auto-transformer.

Fig. 26 - Primary-resistance and primary-reactor methods of reduced voltoge starting for squirrel-cage motors?
When is primary-resistance starting employed?
Generally only for small motors on light-starting duty. The method is easily adjustable to suit the load and gives a smooth breakaway against low torque. If the resistance is adjustable, as in a faceplate starter, starting can be very smooth and this is useful for motors that must be started without any shock that might cause injury to the material being handled by the driven machine.
When is the primary reactor method of starting employed?
Mainly for high-tension motors on very light-starting load where a fairly heavy starting current can be permitted - e.g. boiler-feed pumps in a large power station.

Fig. 27- Star-delta methods of reduced-voltage starting for squirrel-cage motors.
Showing the switching sequence for plain and Wauchope methods.
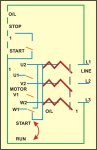
Fig. 28- Bask circuit of star-delta starter employing line contactor and hand-operated start-run switch.
The start button must be depressed until the switch is moved into the 'run' position. I indicates contactor coil, line switch and maintaining contacts operated by the contactor coil.When is the star-delta starter used?
When the starting current has to be reduced and starting current and torque values one-third of those obtained with direct-on-line starting are suitable. It is necessary that the motor be designed to operate with the primary winding connected in delta, but with six terminals brought out to allow for connection in star during starting.
The plain star-delta method is used for small and medium-sized motors on light-starting loads, e.g. centrifugal pumps, fans having low inertia, line shafting and motor-generator sets. The Wauchope-type has the same uses but prevents the drop in speed when the stator is disconnected from the supply in changing from star to delta. Switching is done through resistances to maintain continuous line contact. This also obviates the momentary high current when switching from star to delta.

Fig. 29- Connection diagram of air-brake hand-operated star-delta starter with line contactor.
What are the connections for a star-delta starter?
Motors arranged for star-delta starting have six terminals - the two ends of each phase winding being brought out to terminals marked U1, V1, W1 and U2, V2, W2. These terminals are connected to similarly-marked terminals in the starter.
The basic circuit of a typical hand-operated air-break or oil-immersed starter is shown in the diagram, the incoming supply being controlled by a line contactor. With the change-over switch in the start position, the motor windings are connected in star (U1, V1 and W1 together) and in the running position in delta (U2 to W1, V2 to U1 and W2 to Vi). In starting the motor, the handle of the change-over switch is put into the start position, as indicated, and the 'start' button is pressed. This energizes the contactor coil which closes the triple-pole main switch and auxiliary switch (1). Note that the contactor coil cannot be energized unless the changeover switch has been placed in the 'start' position.
When the motor has reached full speed, which is noticeable by sound, the handle of the change-over switch is moved to the 'run' position and the 'start' button is released. The motor is now directly connected to the line.
In some star-delta starters, the overload units are by-passed in the 'start' position. A complete connection diagram of a hand-operated star-delta starter with this feature is also shown. Apart from the fact that the over-load units are brought into circuit only in the ~run~ position, the circuit is the same at the basic circuit.
A fully-automatic star-delta starter has two contactors and a triple-pole line contactor with time-delay relay between 'start' and 'run' connections.
When is an auto-transformer starter used?
When more flexibility is required for starting a squirrel-cage motor than is provided by the star-delta method, which is limited as far as starting torque is concerned. Auto-transformer starting permits the stator to be wound for running in star. The starting torque can be adjusted to suit the load by changing the voltage tapping on the auto-transformer. Both starting torque and current are reduced in the same proportion.
It is used for motors of medium and large size on light starting loads (e.g. centrifugal pumps, fans, compressors and mills). Up to about 75kW the simple auto-transformer starter is employed; above this, the Korndorfer connection is recommended.
What does the simple auto-transformer starter consist of?
The basic diagram is shown. The motor is started by connecting its primary to toppings on the starting transformer; then after a time delay, re-connecting direct to the supply. The winding on each limb of the auto-transformer usually has three taps, 60, 75 and 85 per cent of line voltage, but taps to give other percentages may be arranged as required. The auto-transformer may be used in conjunction with a contactor panel, or alternatively a hand-operated switch.
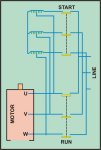
Fig. 30 - Basic diagram of auto-transformer starter for squirrel-cage motor.

Fig. 31 - Connection diagram for air-break hand-operated auto-transformer starter with line contactor.
The accompanying illustration shows the wiring diagram of an auto-transformer starter consisting of a line contactor interlocked with a hand-operated change-over switch, three thermal or magnetic overload relays and an auto-transformer.
What are the connections for the korndorfer system?
The simple auto-transformer starter has the disadvantage that at the instant of transition from 'start' to 'run' the supply to the motor is interrupted. This means that the insulation may be stressed by high transient voltages.
The Korndorfer method keeps the motor connected to the supply continuously by means of the connections shown in the diagram. On the first step (a), switches 1 and 2 close and the motor accelerates at a reduced voltage determined by the transformer tapping. On the second step (b), the star point of the transformer (switch 2) is opened so that the motor continues to run with part of the transformer winding in circuit. Next, this part is short-circuited by the 'run' contactor or switch (switch 3 closes) and finally the 'start' contactor or switch (1) is opened, as shown at (c). A fully automatic starter would comprise a triple-pole line contactor, start contactor, running contactor, three single-pole overload relays, auto-transformer with a set of links for tap-changing, a suitable timer, and 'start' and 'stop' pushbuttons.

Fig. 32 - Switching sequence for auto-transformer starting by the korndorfer method.
a. Motor at reduced voltage from transformer.
b. Motor with port of transformer winding in series.
c. Motor at full voltage.What precautions should be observed when applying reduced voltage starting to a load with rising characteristic such as fans?
If the specified starting current is too low, the motor may start correctly but not run fully up to speed. The result is that on changing over to the running or full-voltage condition a very high current may be taken, thus negating the low initial current. For this reason, even with fan drives, it is not desirable to pin the starting current lower than about 200 percent of full-load current.
What are the initial-starting line current and motor torque when star-delta starting?
Both line current and torque are approximately one-third of the motor standstill values on full volts.
What are the initial starting line current and motor torque when starting with primary resistance or primary reactance?
The initial starting line current is approximately equal to
| applied voltage | x | standstill current |
| full voltage | with full volts |
The initial starting torque is approximately equal to
| ( | applied voltage | )2 | x | standstill torque |
| full voltage | with full volts |
What are the initial-starting line current and motor torque when starting by auto-transformer?
The initial-starting line current is approximately equal to
| 1.1 ( | applied voltage | )2 | x | standstill current |
| full voltage | with full volts |
The factor of 1.1 in the above allows for the magnetizing current of the auto-transformer.
The initial starting torque is approximately equal to
| ( | applied voltage | )2 | x | standstill torque |
| full voltage | with full volts |
Why are the above values of initial-starting current and torque approximate?
Because the formulae given assume for simplicity that the standstill/reactance of a motor is constant at all voltages -that the short-circuit current varies in direct proportion to the applied voltage. Owing to magnetic saturation, particularly of the slot lips, the standstill reactance tends to be less on full volts than on reduced volts so the current and torque values tend to be rather less than those obtained by the formulae given.
How do the various methods of starting on reduced voltage compare as regards torque per ampere?
Star-delta and auto-transformer methods have the advantage over primary resistance and primary reactor methods.
What mechanical methods of reducing starting current can be adopted?
The starting duty can be reduced by fitting a centrifugal or other type of clutch which only picks up the load when the motor is well up to speed.
What is sequence starting?
A system of starting by which several motors of similar rating are started in sequence off one starter in conjunction with interlocked switching.
How are slip-ring motors started?
By first switching the supply on the stator winding with all the external rotor resistance in circuit across the slip rings and then cutting out the rotor resistance progressively as the motor speeds up until finally the rotor winding is short-circuited.
What is the usual arrangement of connections for a hand-operated slip-ring starter?
Small slip-ring starters usually consist of a contactor for the stator circuit and a face plate-type starting resistance for the rotor circuit. The basic essentials are shown, the three wires from the stator going to slip-ring terminals R, S and T on the motor. An actual wiring diagram is also shown. The starter must be fitted with interlocks to ensure that the resistance is all-in when starting. With a contactor controlling the stator supply, interlocking is simply effected, as shown, through electrical contacts on the arm of the rotor starter, no current reaching the contactor coil 1 unless the arm is in the starting position. The start button must be kept depressed until all resistance has been taken out; this ensures that the motor is not accidentally left running with some of the rotor resistance still in circuit. When the operating arm of the face- plate is in the 'run' position the start button is short-circuited.

Fig. 33 - Bask diagram of contactor starter for slip-ring motor with faceplate-type secondary resistance.
I indicates contactor coil and contacts operated by the contactor coil.If the motor is fitted with a device designed to lift the brushes and short-circuit the slip rings when the motor is up to speed, an interlock must be arranged in the control circuit to ensure that the brush-gear is in the starting position before the stator contactor can close.
For larger motors, a stator oil switch is usual and may be used in conjunction with a liquid resistance or an oil-immersed grid resistance in the rotor circuit.
What are the essentials of a full-automatic stator-rotor starter?
An automatic starter would include a triple pole contactor to control the stator circuit, together with rotor-resistance grids short-circuited by the necessary number of accelerating contactors, the last of which must be continuously rated to carry the full-load rotor current. Also required are the necessary number of overload relays and timers controlling the duration of the starting period. The number of timers and accelerating contactors correspond to the number of steps of rotor resistance that are provided.
A wiring diagram -of an automatic slip ring motor starter with two steps of rotor resistance is shown. Control terminals are provided for pushbutton control from one or two positions, or alternatively, for automatic control (for use with thermostat, float-switch or similar switching) with or without a try-out switch.
When the 'start' button is pressed (or the automatic switch closes), the control circuit is made through the coil of the stator contactor M. The stator contactor closes, connecting the stator to the line. At the same time the first timing relay is TR1 is energized. At this stage, the rotor is complete through the whole resistance since the accelerating contactors 2R and 3R are open. After an adjustable delay, the contacts of TR1 close, thus energizing the accelerating contactor 2R which short-circuits a portion of the rotor resistance and energizing the second timing relay TR2. When in turn the contacts of TR2 close the second and, in this case, final contactor 3R is energized and closes, short-circuiting the whole of the rotor resistance. The overload relays are in circuit during starting and running. For automatic (2-wire) remote control, hand-resetting overloads are essential.
How is speed control of a slip-ring motor effected?
By introducing resistance into the rotor circuit similar to a starting resistance except that the heat losses in the resistance must be dissipated continuously. Unless the duty is intermittent, all except small sizes require some means of cooling the resistors. Grid resistances with a motor-driven fan may be used in conjunction with a drum controller. Alternative methods are oil-immersed resistances or a liquid resistance cooled by circulating water through cooling tubes.
What is liquid resistance?
Insulated pots filled with a resistance solution of electrolyte, e.g. caustic soda or washing soda. Plates connected to the slip rings dip into the pots and are shorted out in the full-speed position.
Liquid starters and controllers are used for large motors.
Fig. 34 - Connections of air-brake stator-rotor starter.

Fig. 35 - Connections of automatic slip-ring motor starter.
What is the advantage of a liquid resistance for starting purposes?
Resistance may be reduced continuously so that, with close control over the current as indicated on an ammeter, a very smooth start can be obtained.
What is a slip resistance?
A fixed step of rotor resistance used to limit the current token from the supply at the instant when peak load is applied to the motor. It is often desirable to do this on press drives, guillotines, etc. As the resistance value is small, it is usual to have a conventional starter so arranged that the last step of resistance is not cut out when the starting handle is right home. This last step of resistance is continuously rated.
What is meant by motors in synchronous tie?
When the two slip-ring motors ore required to run at the same speed, it is possible to do this by connecting their rotors together through the slip rings in conjunction with a single slip resistance. The starter for such a scheme includes a single rotor resistance, the last step of which is the continuously-rated slip resistance, and two-stator contactors, one for each motor. In order to limit the circulating current in the event of the motors being out of phase when started, a reactance is usually inserted in the interconnecting tie. The reactor is wound in two sections, and connected so that it is non-inductive to currents flowing through each half into the slip resistance but inductive to circulating currents between rotors. This reactance also assists load sharing when the two motors are driving a common load, as for example travel motors at opposite ends of an overhead crane.
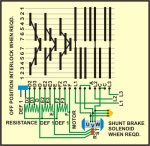
Fig. 36 - Connections of reversing-drum controller and three-phase slip-ring motor.
The controller gives speed control by varying resistance in series with the rotor windings and also breaks the three-staler phase in the 'off' position. The moving-copper-contact rings ore shown as thick horizontal lines, while the forward and reverse steps are indicated by the numbered vertical lines. The diagram below shows the connections of series limit switches when used.BRAKING OF A.C. MOTORS
When is braking of an electric motor required?
When there is a need to bring a drive quickly to rest, to hold a drive at standstill after some operation has been completed, or to check the speed rise of a motor with an overhauling load.
What are the principal ways of braking electric motors?
By mechanical braking, by arranging the motor itself to exert a braking torque, or a combination of the two methods.
With mechanical braking, a drum or disc friction-type brake is usual, the brake shoes being held off against spring loading by a solenoid or electrically-operated thruster gear normally connected across the motor terminals. Apart from mechanical braking, there are three principal methods:
- Regenerative braking, applied to overhauling loads; it can only be used to reduce the speed to the no-load or synchronous value.
- Counter-current braking or plugging, achieved by reconnecting the machine so that its output torque reverses.
- Dynamic braking, obtained by disconnecting the machine from the mains and establishing a fixed magnetic field from a DC supply which causes e.m.f.s. to be induced in the rotor windings. Powerful dynamic braking may be obtained by introducing capacitors into an induction-motor circuit, with or without DC injection.
How is plugging applied to AC motors?
The phase sequence of the supply (in the case of 3-phase) is reversed by interchanging two leads. The usual arrangement for squirrel-cage motors is by a reverse contactor which closes when the stop button is operated. The supply to the motor must be disconnected as the speed nears zero. This is effected by having a reverse-rotation relay coupled to the motor shaft and connected to open the braking-contactor coil before the motor reverses. The motor takes heavy current from the supply unless resistance is added to the stator circuit. Rotor resistance may be employed to ensure that a high braking torque is obtained.
Plugging is the commonest braking method used with Scharge type AC commutator motors. With this type, provision must be made in the control gear to insert a resistance in each secondary phase during plugging to limit current to a safe value.
How is DC-injection braking applied to induction motors?
Direct current is injected into the stator winding after this winding has been disconnected from the supply. This sets up a stationary field, inducing e.m.f.s. and hence currents in the rotor circuits. This method provides a high-braking torque with low losses, but the braking effect is small at high speeds for machines of normal slip and it is usually necessary to use heavy DC exciting currents to effect a quick-stop. Some improvement of the braking characteristic can be made by increasing the rotor-circuit resistance at high speeds and reducing it as the speed falls.

Fig. 37- Bask connection diagram for capacitor and magnetic dynamic braking.
Operation of stop button opens supply lines and inserts capacitors C across motor terminals. Voltage relay VR provides the necessary delay before operating to short-circuit the motor terminals. Instead of VR a timer or limit switches maybe used RI are resistors for controlling braking torque. R2 discharge resistors and R3 control resistor for relay drop-out voltage.The control gear must include a transformer and rectifier to give a low-voltage heavy-current DC which is applied to the motor windings when the stop button is operated. If secondary resistance is included to increase the available braking torque, provision for this is required. The direct current is usually disconnected after a time delay. Direct-current-injection braking has the advantage over plugging that reversal of the motor cannot take place.
Can DC-injection braking be applied to other types of AC motor?
It is commonly applied to stator-fed shunt AC commutator motors and may also be used with Scharge motors. Dynamic braking can be applied lathe synchronous motor. The supply is disconnected while the DC field of the motor is maintained and resistance connected across the stator winding. The machine then runs as an alternator feeding into a load of fixed resistance.
How is capacitor braking applied to induction motors?
Capacitor dynamic braking uses the ability of the induction motor to self-excite if sufficient capacitance is connected across its terminals when the supply is removed. The motor then runs as an induction generator and dissipates power with subsequent braking effect. If the motor terminals are then short-circuited, magnetic braking follows. A typical basic connection diagram is shown in Figure 37. Capacitor braking followed by simultaneous magnetic and DC-injection braking may be applied when load inertia is very high.
SPEED CONTROL OF A.C. MOTORS
What three-phase motors are available for speed control?
In addition lathe slip-ring motor, the following:
- Pole changing or, more recently, pole-amplitude modulated squirrel-cage induction motors suitable for drives requiring two or three predetermined speeds.
- Induction motors with thyristor controllers to provide a variable frequency supply.
- Commutator motors of various types in which the rotor is supplied with a voltage of its own, allowing the speed to be varied over a wide range without energy losses.
- Combinations of induction motors and AC commutator machines, making possible any desired control of speed.
How can an induction motor be wound to give two or more speeds?
The stator can be wound with two separate windings each with differing numbers of poles. By switching the supply lines from one to the other winding, such a stator can be made to give two different speeds. E.g. 8-pole and 10-pole windings would give speeds of 750 and 600 r/min (synchronous). Another method of obtaining two speeds is to arrange a single winding, so that, by reversing one half of the coils, it can be changed to a winding having double the number of poles, e.g. 0.4-pole to an 8-pole winding. This is called a pole-change or tapped winding and the principle is shown in the diagram. Carrying the idea further, two topped windings can be used, resulting in a four-speed machine, e.g. 4/8 and 6/12 poles to give 1 500/750 r/min and 1000/500 r/min (synchronous).
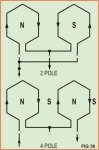
Fig. 38 - Basic arrangement of pole-change or tapped windings.
What is pole amplitude modulation?
This is a technique used in the design of three-phase induction motor stator windings. Using p.a.m. the motor can be arranged to have two or more different operating speeds with only a single stator winding. Unlike the pole-change winding, speed ratios other than 2:1 con be obtained. Basically, selected halves of the phase windings are reversed; special groupings of the coil are used and in some cases certain coils are omitted. The switching is done by control circuitry external to the motor. A typical torque/speed characteristic for a p.a.m. motor designed for operation at two speeds in the ratio 1.5:1 is shown in Figure 39.
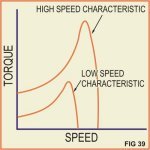
Fig. 39 - Torque-speed characteristics for two-speed p.a.m. motor with speeds in the ratio 1,5:1.
How are p.a.m. windings connected to give two motor speeds?
Many different configurations are possible, depending on the particular application but figure 40 shows a typical one. For low speed operation the control gear connects the half phase windings in the series-star configuration, and for high speeds the windings are connected in parallel star.

Fig. 40 - Winding arrangement for a two-speed p.a.m. motor.
For normal (unmodulated) operation: supply U3, V3 and W3, isolate 112, V2 and W2.
For modulated operation: supply 112, V2and W2, loin 113, V3 and W3.What are p.a.m. motors used for?
Applications where speed is not so critical, as in ventilation fans and some types of pumps, do not require a continuously variable speed motor with the consequent expense. Here the relative cheapness of the p.a.m. motor compared with the equivalent two-winding type is leading lathe increasing use of the p.a.m. motors for these applications.
What other form of speed control is used with induction motors?
Continuously variable speed can be obtained if the stator is fed with a three-phase voltage of variable frequency. Using solid-state switches known as thyristors, the frequency of the supply can be varied from zero up to about four times its original value, and this allows the speed of the motor to be varied continuously over a wide range.
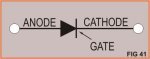
Fig. 41 - Symbol for a thyristor -a three-terminal solid state switch.
The thyristor therefore permits the squirrel-cage induction motor to be used for variable speed applications, with the motor's attendant advantages of ruggedness, cheapness and high power to weight ratio.
What is a thyristor?
This is a three-terminal solid-state device (Figure 41) that will conduct in one direction only (from anode to cathode) and then only when it is 'fired' by a pulse applied to the gate terminal. When used with an AC supply, the thyristor will conduct, after being fired, on the positive half cycle of the supply, but when the polarity reverses it switches off by itself. When the supply goes positive a pulse must be applied lathe gate of the thyristor to switch it on again. The two types of controller in most general use for controlling induction motors are the cycloconverter and the DC link inverter.
What are the disadvantages of thyristor controllers?
The main drawbacks are the cost of the thyristors and associated circuitry and the production of harmonics in the motor and the supply system. The particular disadvantage of the cycloconverter is its restricted output frequency which limits the maximum speed of any motor with which it is used. The DC link inverter does not suffer from this limitation as it provides a much greater range of speeds, but it involves the use of more thyristors and it is therefore more expensive.
What are the three main types of 3-phase AC commutator motor?
- Stator-fed.
- Rotor-fed (or Scharge).
- Series.
What is the effect of supplying the rotor winding with a voltage from an external source?
By injecting an externally-applied variable voltage, of the required frequency (through a commutator) into the rotor winding, it is possible to vary the speed of the motor above and below synchronous speed. About each of these speeds the motor behaves in the same fashion as a normal induction motor. The principle can be explained by taking the simple example of a rotor with a stand-still voltage of 100 volts induced in its windings by the rotating magnetic field with the rotor windings short-circuited. The rotor will run up to near synchronous speed if unloaded, until in fact the rotor voltage is practically zero and sufficient current flows to supply the very small torque on no-load. If now an e.m.f. of 20 volts is supplied to the rotor in the opposite direction to, and at the same frequency as, the voltage normally induced from the rotating field, the motor will respond by running at such a speed that about 20 volts is induced in it from the field. This induced voltage will occur when the slip is 20 per cent (or speed is 80 per cent) of the synchronous speed, and at this point the induced rotor voltage and the voltage applied to the rotor externally will practically balance.
If the 20 volts injected into the rotor winding is in the same direction as the normal induced rotor voltage, the motor will run up to 20 percent above synchronism the rotor induced voltage reverses.
How does this method of speed variation compare in efficiency with rotor-resistance control of speed?
It is much more efficient because the power applied to the rotor is returned to the line. Also, changes in load do not result in large fluctuations in speed.
How does a variable-speed stator-fed AC commutator motor operate?
The stator winding is of the induction motor type fed from the AC supply. The rotor winding is connected to a commutator instead of slip-rings and resembles an ordinary DC armature. Brushes are equally-spaced around the commutator according to the number of phases. For example, a 2-pole rotor could have 3-brushes equally spaced to give three phases. The important fact to note is that the rotating field set up by the stator windings sweeps past the brushes as synchronous speed and consequently the frequency of the e.m.f. appearing at the brushes is the same as that in the staler. With a 50 Hz supply to the staler, the brush frequency will also be 50 Hz no matter at what speed the rotor is moving. Hence if we wish to supply an e.m.f. lathe rotor in order to vary the speed, we con do this from a 50Hz supply. This supply to the rotor brushes is normally obtained through an induction regulator which ads in effect like a variable-ratio transformer, enabling the injected voltage to be varied smoothly to any desired value.
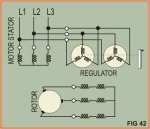
Fig. 42 - Connections for staler-fed AC commutator motor.
The arrangement is usually called the staler-fed or fixed-brush shunt-characteristic AC commutator motor.
How does the variable-speed rotor-fed AC commutator motor work?
In this type of motor, also called the Scharge or variable-brush AC commutator motor, a different method of injecting the speed-varying e.m.f. into the secondary winding is employed. Referring to Figure 45, the supply is led lathe rotor winding through slip rings, the rotor winding being the primary. The secondary winding is on the staler. On the rotor is an additional regulating winding with a commutator. The ends of the staler (secondary) windings are connected to brushes disposed on the commutator.
The first point to notice, is that when the rotor is at standstill, the rotating field sweeps past the secondary winding and the brushes at synchronous speed. As the motor gains speed, the frequency in the secondary windings and, due lathe commutator, the frequency at the brushes are both reduced simultaneously. No matter at what speed the rotor is moving, the brush frequency ties up with the secondary frequency and, as a result, voltage con be picked up from the commutator and injected into the secondary windings. The method of varying the e.m.f. injected into the secondary windings is by altering the amount of commutator spanned by each pair of brushes. The pairs of brushes are arranged so that they can be moved simultaneously equal distances from the in-line position. When in-line, each pair of brushes rests on the same commutator segment. At this position, each secondary phase winding is short-circuited and no phase voltage is injected; consequently the speed is that of a normal induction motor. Movement of the brushes in one direction or the other increases or decreases the speed. Brush movement can be done by hand wheel or by means of a small servo or pilot motor, remotely-controlled. The general characteristics of this rotor-fed molar are the same as those of the staler-fed type.
How does the variable-speed series AC commutator motor work?
A series characteristic is provided by connecting the stator and rotor in series, as shown in the diagram. The commutator on the rotor is fed from a transformer because, in general, the supply voltage is too high to allow of satisfactory commutation. It is also useful when the supply is high-tension (e.g. 3300 volts) and constitutes one advantage of this type, since it is virtually impossible to arrange a rotor-fed motor for a high-tension supply, although the staler-fed type is somewhat easier in this respect. Speed is controlled by brush movement, which has the effect of varying the phase agreement between the staler and rotor and thus strengthening or weakening the field.

Fig. 43 - Arrangement of windings of rotor-fed (Scharge) AC commutator motor.
P is the primary winding, located on the rotor underneath the commutator winding and supplied through sup rings. S is the secondary winding located on staler. C is the commutator.The speed-torque characteristic is very similar to that of a DC series motor, with the difference that even at the highest speed setting the no-load speed rises to only about 170 percent of the synchronous speed. Hence there is no danger from a run-away speed if the load is removed from the motor. This type of motor is specially suited to large printing press drives as the series characteristic gives a very good load sharing amongst a group of motors driving a press.
What arrangements of control gear are required for squirrel-cage change-pole motors?
The control gear must be selected to suit the motor windings, whether (1) a single tapped winding, (2) two separate windings, (3) two separate windings with one or both tapped.
Contactor starters are usual, although small sizes may be controlled by a single contactor in conjunction with a selector switch.
Direct-on-line starting is normal, but sometimes the contactors are interlocked so that starting must be at the lowest speed connection. This is only specified to protect the driven machine, as a change-pole motor is suitable for starling on any speed connection. For molars with a single tapped winding giving two speeds, three contactors or switch positions are required. Two alternative winding connections commonly used are shown.
For motors having two separate windings giving two speeds, two direct-on-line contactors, one for each winding are used and are interlocked to prevent both closing together.

Fig. 44 - Typical connections of 3-phase series commutator motor.
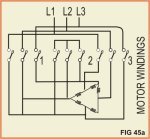 |
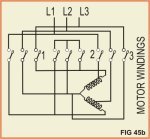 |
Fig. 45 - Bask diagrams of control tar two-speed change-pole AC motor.
For motors with two separate windings, one or both tapped, a combination of the above is required.
How is the stator-fed commutator motor controlled?
The staler-fed commutator motor has the supply taken to the staler, while a separate regulator for speed control is wired to fix brush gear on the commutator.
Depending on the speed range, direct-on-starting may be used, with a low-speed interlock fitted on the regulator to ensure that the machine is set for starting before the circuit-breaker or supply contactor can be closed. A typical circuit is shown.
Where the speed range is short, direct-on-line starling may not be permissible and some farm of resistance starling is then required. This may be either primary or secondary resistance, rotor resistance being usual on high-voltage supplies or where high torque at starling is required. The diagram shows two methods of connecting the starting resistance.
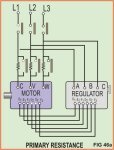 |
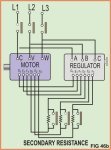 |
Fig. 46 - Resistance starting of stator-fed AC commutator motor.
SYNCHRONOUS MOTORS
What are 3-phase synchronous motors?
Motors of moderate to large power in which the rotor, having been brought up to speed, is pulled into step with the rotating field and therefore runs at a constant synchronous speed. There are two main types - salient-pole synchronous end synchronous-induction. Normally bath types have a similar staler winding to that of the induction motor. The winding when connected to the supply develops a rotating field, but after starling instead of using it to induce e.m.f.s. in the rotor conductors, torque is obtained by introducing fixed-polarity magnetic fields on the rotor to operate in conjunction with the current in the staler.
Generally synchronous molars are arranged to start as induction molars and, when up to full induction-motor speed, are converted to synchronous running by injecting direct current into the rotor windings. The rotor then pulls into step with the staler rotating field.
How does the rotor of a salient-pole synchronous motor operate?
The rotor has salient-pales similar in construction to the rotor of an alternator.
It usually starts as a squirrel-cage motor by means of capper bars embedded in the pole faces, the bars being connected together by end-rings to form a squirrel-cage winding. After running up to full induction-motor speed, the rotor pulls into synchronism through the action of the DC current flowing in the rotating field coils and derived from a DC exciter.
Lower starting current for a given torque is obtained by employing an insulated 3-phase winding located in the pale faces, instead of using a simple squirrel-cage, the winding being connected through slip rings to an external resistance. The resistance is varied during the starting period as for a slip-ring induction motor.
How is the rotor of a synchronous induction motor constructed?
The rotor closely resembles that of a slip-ring induction motor and is run up by means of a rotor-resistance starter in the same way as a slip-ring induction motor, tow-voltage synchronous induction-motors may be of 'inverted' construction, with the primary windings on the rotor and the secondary on the staler.
What are the applications of synchronous motors?
The DC excitation of the rotor can be increased to a point where it takes over the magnetizing function of the stator. In this event, the stator power factor is increased to unity, so that no wattless lagging current flows from the supply to the motor. By increasing the excitation current beyond this point, the stator current can be made leading and this leading current can be used to magnetize any other motors connected to the supply in the factory, thus further improving the overall power factor of the system. The synchronous meter therefore serves the dual purpose of providing a constant-speed drive for a large piece of machinery that requires to be run continuously and at the same lime of operating at unity power factor or any desired leading power factor, in order to correct the low power factor in the remainder of the plant.
Synchronous motors are normally suitable for only one specific direction of rotation.
The synchronous-induction motor gives a better starling performance, but the salient-pole type with squirrel-cage is preferred, when starling performance permits, because it gives about 1.5 per cent higher efficiency.
What control gear is required for synchronous motors?
The DC-excitation equipment comprises the field switch with discharge resistance and the exciter-field rheostat.
The AC equipment will depend on the type of starling used.
If started as a squirrel-cage induction motor, the damping winding in the pole faces acts as the induction-meter secondary, while the field windings are usually connected to the discharge resistance.
Direct-on-line, auto-transformer or primary resistance or reader starting is usual, depending on the starting current permitted or on the torque required. The motor accelerates to a speed just below synchronism, whereupon the excitation can be adjusted to give the required power factor.
Automatic installations involving starting, synchronizing and possibly power-factor central are available. The majority of synchronous-motor equipments, however, comprise individual units, such as stator oil-switch, auto-transformer or reactor with associated switches if required for starting, and an excitation panel including power factor meter and ammeter.
If the machine is started as a slip-ring motor, a secondary winding in the rotor pole faces may be connected to slip rings; alternatively, the exciting winding may be of the distributed type which also serves as a motor winding for starting purposes. In the first type, the slip-ring winding remains short-circuited after starting and acts as a pole-face damper. With the distributed dual-purpose winding, prevision is mode in the control gear for connecting it to the exciter for synchronizing.
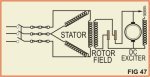
Fig. 47 - Three-phase synchronous motor.
What is a reluctance motor?
This is a special form of synchronous motor that does net require excitation of the rotor.
A relating field is produced by the staler normally by a three-phase winding although single-phase types are available. The important feature of the reluctance motor is that there are two flux paths through the rotor, called the direct axis and quadrature axis. These two paths have very different reluctances and the reluctance torque arises from the tendency of the rotor to align itself in the minimum reluctance position relative lathe rotating magnetic field. The reluctance torque is maintained only at synchronous speed and so a cage winding is incorporated for starting purposes.
What are the applications of reluctance motors?
Reluctance molars are used in synchronized multi-motor drives, for operation of relating stores in computers, and nuclear red positioning drives.
SINGLE-PHASE MOTORS
When are single-phase motors employed?
When the only available alternating-current supply is single-phase. In general, when a three-phase supply is available, three-phase motors are preferred, although exceptions are often made in the case of fractional-kilowatt drives.
What type of single-phase motors are in use?
- Induction motors (split-phase, capacitor and shaded-pale).
- Repulsion and repulsion-induction motors.
- Universal motors.
- Unexcited synchronous motors.
What is the principle of the single-phase induction motor?
A single-phase winding sets up an alternating magnetic field. Since this field does not rotate, a single-phase winding alone cannot produce torque to start the motor from rest. Once the motor has been started, however, it will continue to run provided the load is not too high. To start the motor electrically, it is necessary to employ an auxiliary winding in parallel and make the current in this winding differ in phase from the current in the main winding. Simulating a two-phase supply in this way, the combined effect of the fields set up by the two windings is a more or less effective relating field, thus providing a starting torque.
After starting, relation of the field is carried out by currents set up in the secondary winding and the auxiliary primary winding is generally switched out of circuit.
How does the single-phase induction motor work?
The auxiliary winding is usually wound with about the same number of turns as the main winding but of much smaller wire. Because of the much higher resistance of the auxiliary winding, the current in it is more in phase with the supply voltage than is the current in the main winding. In practice, a phase difference of about 30 degrees is attained, which is somewhat lower than the ideal value of 90 degrees but sufficient to give ample starting torque against light load.
The auxiliary winding is usually short-time rated - it would overheat if left in circuit for more than a few seconds - so it is cut out of circuit immediately starling is accomplished.
What are the applications of the split-phase induction motor?
Fractional-kilowatt drives for appliances that can be brought up to speed quickly. A typical starting torque is 175 to 200 per cent of the full load torque.
What is a capacitor motor?
A single-phase induction molar in which the difference in phase between the main and auxiliary windings is effected by connecting a capacitor in series with the auxiliary winding. Because of the capacitor, the auxiliary-phase current approaches 90 degrees in advance of the main-phase current, giving a much higher starling torque than is possible with a split-phase meter.

Fig. 48 - Typical single-phase-motor starting connections.
Capacitor start-run motors give superior running characteristics, and high power factor.There are three main types of capacitor motor:
- Capacitor-start induction-run (the capacitor winding being in circuit only during the starting period).
- Permanent split-capacitor motor, in which the capacitor winding is in circuit for both starting and running.
- Capacitor start-and-run motor, using two capacitors for starting, one of them being cut out for running.
When is the capacitor-start motor used?
When really high starling torque is necessary, as for example, meters driving refrigerator compressors. A starting torque of 300 per cent or more can be obtained.
What type of capacitor is employed for capacitor-start motors?
Generally a dry-type electrolytic capacitor because it has large value of capacitance in small bulk and is the cheapest. This type of capacitor is short-time rated for AC working and is therefore suitable only for starting applications where the duty is intermittent.
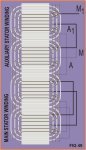
Fig. 49 - Windings of split-phase motor.
As the voltage across starting capacitors can be higher than the mains voltage their voltage rating must be suitable, e.g. 275 volt rating for 200-250-volt motors, when the capacitor is connected in the usual way in series with the auxiliary winding. Figure 43 shows a method of connecting a capacitor to allow its working-voltage rating to be lower than mains voltage.
What are the applications of the permanent split-capacitor motor?
For smell motors with light starting duties, such us fan drives and coil burners. Only a smell capacitor is required and this is left in circuit to avoid the complication of the extra switch. The fact that the auxiliary winding is in circuit whilst running improves the machine performance considerably in respect of power factor and quiet running. A paper-dielectric capacitor must be used, because the electrolytic capacitor is not suitable for continuous operation.
What is the object of using two capacitors?
A capacitor-start capacitor-run motor can be employed when the starling duty is severe and it is desired to achieve a high power-factor when running. A smaller capacitance is required for running than for starting, so two capacitors are used in parallel for starling and one capacitor is cut out for running. Special care in the design is necessary when capacitors are run in parallel, as a high surge voltage con take place on switching out.
How is the single-phase induction motor switched from start to run?
Switching is usually done automatically bye centrifugal switch mounted on the motor shaft, but it can also be done by hand switching by responsible operators. An alternative to the use of a centrifugal switch is a specially-designed relay switch which controls the starting winding. The relay coil is in series with the running winding so that the heavy current passing through the coil when switching on with the rotor at rest causes the relay contacts to close the circuit of the starting winding. As motor speed rises, the current in the running winding and therefore in the relay coil falls and at a predetermined current value the relay contacts are released, so disconnecting the starting winding.
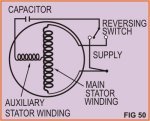
Fig. 50 - Capacitor-motor tee connection.
The diagram also shows connections for a reversing switch.How is a split-phase or capacitor induction motor reversed?
By changing over the ends of the starting winding at the motor.
What is a shaded-pole motor?
A type of single-phase induction motor for very small powers in which a starting torque is provided by permanently short-circuited coils displaced in position from the main staler coils. The rotor is squirrel-cage. The most usual form of a motor of this type has salient poles on the staler somewhat similar to the poles of a universal motor. Each pole is unequally divided by a slot cut in the laminations allowing one side of the pole to be surrounded by a heavy copper band, known as a shading coil or loop.
Other forms of shaded-pole mater have the normal induction motor staler, its windings consisting of single-phase winding and a shading winding, the latter being wave-wound and short-circuited inside the motor or at its terminals.
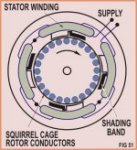
Fig. 51 - Shaded-pole motor.
How does the shaded-pole motor operate?
The shading loop acts as a short-circuited low-resistance coil in which is induced by transformer action a heavy current lagging in time phase with the main flux in the pole. The current in this loop produces a flux which lags in time the main flux in the unshaded portion of the pole. The resultant effect is a movement of flux across the pole face and air gap, thereby producing a magnetic field which cuts the rotor conductors.
What are the applications of the shaded-pole motor?
This type of motor requires no automatic centrifugal or other type of starting switch since there is no starting winding to be switched out of circuit. Its simple construction makes it a particularly robust machine suitable for long-hour duty. It is net, however, as efficient electrically as ether single-phase induction motors mainly on account of the fairly-heavy copper-losses in the pole-shading loops. Usual sizes of such meters are up to about 25 W and they are used where efficiency is of little importance, such as for driving small fans, motorised valves, recording instruments, record players, etc.
Can the shaded-pole motor be reversed?
The motor is normally net reversible since this would involve mechanical dismantling and reassembly. Special machines are made comprising two rotors on a common shaft, each having its own staler assembled for opposite directions of relation.
What is a universal motor?
A motor in the fractional kilowatt range of about 10 to 400W constructed on similar lines to a series-type DC meter adapted to AC by having a completely-laminated field core. They cannot satisfactorily be made to run at less than about 2000 r/min.
If similar performance on AC and DC is required from meters running at less than about 3000 r/min, a tapped field winding is desirable.
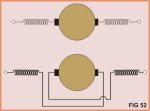
Fig. 52 - Reversal of universal motor.
The connections to the armature windings are changed over to reverse the motor.How are universal motors started?
By switching straight on to the line. Starting torques of up to about five times full-load torque with starling currents of about three to four limes full-lead current, depending upon the size and speed of the molar, are usual.
What are the applications of universal motors?
Universal motors have a series characteristic so that they run at their rated speed only on the rated lead. If the load is reduced the speed will rise. Such motors are suitable for driving fans, vacuum cleaners, domestic sewing machines, portable tools, etc., where the load is constant, or where a steadily-maintained speed is not important. As brush wear takes place mere rapidly in universal meters they are not generally considered suitable for long-hour duty. Speed control and reversing can be arranged as for DC motors. Three-lead reversing, which greatly simplifies the control gear, can be arranged, two separate fields being provided, one for each direction of rotation.
What are repulsion motors?
Single-phase machines made up to about 4kW having a staler wound with a single-phase winding and a rotor very similar to a DC armature with commutator. The brushes are permanently short-circuited. Currents induced in the rotor by the magnetic field from the staler give the rotor a magnetic polarity that, with suitable brush position on the commutator causes repulsion to lake place between like poles of the staler and rater. No rotation results if the brush axis corresponds with the axis of the staler winding, called the neutral position, the magnetic polarity of the rotor then being the same as that of the staler. In this form, the machine is a plain repulsion molar having series characteristics, with which speed rises as the load on the machine is reduced.
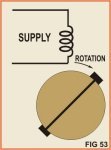
Fig. 53 - Repulsion-motor connections.
The stator is wound with a single phase winding. The rotor is very similar to a DC motor armature with commutator.The machine is often converted into an induction motor during the period of running by arranging that all the
commutator segments are short-circuited by a centrifugally-operated device when the motor is up to speed. The brushes are also lifted in same cases to reduce wear.To avoid the complication of the short-circuiting device, the rotor may be arranged with a squirrel-cage winding at the bottom of the slots. This lakes aver at speed and gives induction-motor characteristics.

Fig. 54 - Two methods of reversing repulsion-motor direction of rotation by switching.
How are repulsion motors reversed?
To get reversed rotation, the brushes are moved round to a corresponding point on the other side of the neutral position. When it is desired to avoid having to move the brushes, two sets of brushes may he used, one set for each rotation and to short-circuit them as required. Another method of avoiding brush movement is by tapping the staler winding and changing the direction of rotation by shifting the axis of the staler poles. This is usually done by one reversing winding in addition to the main winding and a change-over switch, as shown in the diagram.
What are the application of repulsion motors?
The repulsion molar is suitable for drives requiring very high starling torques, although it has been replaced to a large extent by the capacitor motor. Where variable speed is required, a plain repulsion meter (without the short-circuiting and brush-lifting mechanism) can be used, the speed control being obtainable by racking the brushes which may be connected to a hand-wheel or lever on the motor end-bracket.
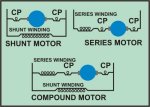
Fig. 55 - Connections of shunt, series and compound-wound motors.
C.P., commutating poles, or interpoles, are not fitted on the smallest motors.DIRECT-CURRENT MOTORS
What are the two basic types of DC motor?
The shunt motor and the series motor. In the shunt motor, the field and armature windings are connected in parallel across the supply. In the series motor, both these windings are connected in series with the supply. The combination of shunt and series field windings result in a compound-wound motor.
Why is a commutator essential in a DC motor?
To reverse the currents in the armature coils as they pass from one pole system to the next so as to obtain a steady forward torque. If direct current were to be passed into the armature windings through slip rings, the result would be that after relation through a pole pitch, the current, being in the same direction, would develop a torque in the reverse relation and no continuous motion would be obtainable.
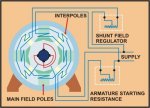
Fig. 56 - Shunt-motor, showing typical connections for windings and control gear.
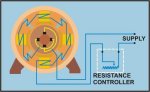
Fig. 57 - Series motor, showing typical connections for windings and control gear.
On what does the speed of a DC motor depend?
The speed at which the armature revolves depends on the number of armature conductors in series and the total magnetic flux of all the poles in the machine. When the line voltage is applied to the armature, certain voltage drops occur due to the passage of the current through the brushes into the commutator, together with further voltage drops due to the circulation of the current around the armature coils. finally, with stable conditions, the armature must relate in its magnetic field at such a speed that a back-voltage is generated equal lathe applied line voltage, less the voltage drops already mentioned.
What are the basic components in DC motor construction?
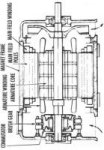
Fig. 58 - Main components of a DC motor.
- The magnetic frame, of cast steel or fabricated from mild-steel plate.
- Main field poles, Since the magnetic poles are stationary in space, only one coil is used per pole and each main field pole consists of laminations of electrical sheet steel riveted together. For large machines, the pale lips only may be laminated.
- Interpoles of mild steel, with their windings, are employed on all DC motors except the smallest.
- Laminated armature core built up on the shaft or rotor hub, with the windings distributed in slots equally spaced around the periphery of the armature.
- A commutator built up from thin segments of copper with strips of micanite to insulate the segments from each ether. A moulded construction may be employed in very small motors.
- Brushes of carbon-capper composition supported in brush boxes and spring loaded.
Why are interpoles used?
lnterpoles are fitted between the main poles except in the very smallest machines. As an armature coil passes through the space between the main poles, it undergoes commutation - the two ends of the coil are short-circuited by the brush before current is reversed in the coil. The dying away of the magnetic flux surrounding the coil conductors and its rise in the opposite direction causes a self-induced voltage in the coil which delays current reversal. This delay leads to bad commutation, indicated by sparking at the trailing edge of the brushes. Poor commutation can be reduced to some extent by moving the brushes from direction of rotation and by using brushes having higher contact resistance. The delay in current reversal can be corrected by inducing into the shorted coils a voltage in opposition lathe self-induced voltage. This is the function of the interpoles.
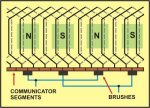
Fig. 59- Simple 4-pole 12-slot lap armature winding.
Two-layer winding, the lower coil sides being indicated by dotted lines.
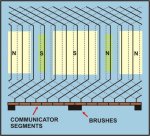
Fig. 60 - Simple 4-pole 13-slot two-layer wave armature winding.

Fig. 61 - Relative position of main poles, interpoles, armature coils and brushes.
The polarity of the interpoles is the same as that of the preceding main pale.

Fig. 62 - Armature coil undergoing commutation.
How are interpole windings connected?
In series with the armature windings and with a polarity of interpole opposite to that of the main pole following the interpole in the direction of rotation (i.e. the interpole has the same polarity as the preceding main pale against the direction of relation).
SYMBOLS
Metric
| D | = Displacement: meters peak-to-peak |
| V | = Velocity: meters/second peak |
| A | = Acceleration: G's peak |
| 1G | = Force of gravity |
| = 9.806 65 m/sec2 | |
| Hz | = Hertz: cycles/second |
Formulas
| D | = 0.318 V/Hz |
| D | = 19.607 A/(Hz)2 |
| V | = 3.1416 (Hz) (D) |
| V | = 61.440 A/Hz |
| A | = 0.051 (Hz)2 (D) |
| A | = 0.016 (V) (Hz) |
VIBRATION IDENTIFICATION GUIDE FOR ASSEMBLED UNIT
| CAUSE | FREQUENCY RELATIVE TO MACHINE RPM | PHASE-STRODE PICTURE | AMPLITUDE | NOTES |
| Unbalance | 1 x rpm | Single steady reference mark | Radial - steady proportional to unbalance | Common cause of vibration |
| Defective anti-friction bearing | 10 to 100 x rpm | Unstable | Measure velocity 0.2 to 1.0 in/sec radial |
Velocity largest at defective bearing. As failure approaches velocity signal increases, frequency decreases. |
| Sleeve bearing | 1 x rpm | Single reference mark | Not large |
Shaft and bearing mark amplitudes about the same. |
| Misalignment coupling or bearing | 2 x rpm. Sometimes 1 or 3 rpm | Usually 2 steady reference marks Sometimes 1 or 3. | High axial |
Axial vibration can be twice race. Use dial indicator as check. |
| Bent shaft | 1 or 2 x rpm | 1 or 2 | High axial | |
| Defective gears | High rpm x gear teeth | Radial |
Use velocity measurement. |
|
| Mechanical looseness | 1 or 2 x rpm | 1 or 2 | Proportional to looseness |
Radial vibration largest in direction of looseness |
| Defective belt | Belt rpm x 1 or 2 | Erratic |
Strobe light will freeze belt. |
|
| Electrical | Power line frequency x 1 or 2 (3600 or 7200 rpm) | 1 or 2 rotating marks | Usually low |
Vibration stops instantly when power is turned off. |
| Oil whip | Less than rpm | Unstable | Radial - unsteady |
Frequency may be as low as half rpm. |
| Aerodynamic | 1 x rpm or number of blades on fan a rpm |
May cause trouble in case of resonance. |
||
| Beat frequency | 1 x rpm | Rotates at beat rate | Variable at beat rate |
Caused by two machines running at close rpm. |
| Resonance | Specific criticals | Single reference mark | High |
Phase changes with reference mark speed. Amplitude decreases above and below resonant speed. Resonance can be removed from operative range by stiffening. |
MOTOR SELECTION FACTORS TO BE CONSIDERED
CHOICE OF MOTOR CAGE OR SLIPRING
This is closely related to accelerating time and method of start, which in turn is associated with load, duly of machine and the supply.
From a price, availability and maintenance point of view, the cage machine must be first choice. Apart from special cases, such as speed matching/control, slipring machines are generally required:
Where high starting torque with a low starting current is necessary.
Where the accelerating time is long, due to a high value of referred load inertia.
When the duty involves frequent inching/starting/plugging.
Note that the above are general statements only, and should not be regarded as 'rules'. Quite often cage machines are driving high inertia loads with quite lengthy accelerating times, especially if the number of starts is low - say one or two starts per day.
Similarly, cage machines are often used for frequent inching/starling/plugging, providing that the referred inertia is low and, if the motor is on NO LOAD between starts.
If the particular application is referred to the Motor Sales Department, then the possibility of using a cage machine con be considered.
When using slipring machines for speed control, power is wasted in the external rotor resistance and speed regulation is not very good.
Cage machines are also suitable for some slipring applications when driving through a slipping clutch arrangement such as a fluid coupling.
SLIPRING INDUCTION MOTOR
The essential employment for Slipring induction motors isto obtain a high starting torque with a low starting current, by means of inserting external resistance in the rotor circuit. The combination of high torque and low current make this machine ideal for high inertia loads having a long accelerating time. Slipring machines are also used for frequent starting and reversing duty, where the external rotor resistance limits the current to safe proportions.
The effects of adding resistance to the rotor circuit is illustrated on the right.
The torque speed is caused to move to the left from the ring's SC position, thus increasing the starting torque up to a maximum value when maximum torque occurs at standstill. Increasing the rotor resistance beyond the value which puts maximum torque at start, causes the starting torque to fall.
Increasing the rotor resistance causes the current to fall to any pre-required value.
Thus it con be seen that a high starting torque can be available during the accelerating period, while the starting current remains relatively low.

Fig 63
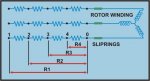
Fig 64
ENCLOSURE & DEGREES OF PROTECTION
The degrees of protection available conform to the requirements of the IP code in SABS 948 (revised), IEC 34-5 and BS 4999/20.
Standard motors are designed to IP 44. Protection to IP 45, P 46, IP 54, IP 55 and IP 56 can also be provided.
| Code | Protection Offered By These Codes Are Against | ||
| IP20 | Contact with live of moving parts greater than 12 mm thickness. | Ingress of foreign bodies with diameter greater than 12 mm. | no protection against water |
| IP21 | harmful effects of vertical drips of water | ||
| IP22 | harmful effects of of drips of water at 15° to vertical | ||
| IP44 | Contact with live of moving parts greater than 1 mm thickness. | Ingress of foreign bodies with diameter greater than 1 mm. | harmful effects of water splashed against the motor from any direction |
| IP45 | harmful effects of water projected from a nozzle from any direction | ||
| IP46 | harmful quantities of water from heavy seas on ships decks entering motors | ||
| IP54 | Any contact with live or moving parts. | Harmful ingress of dust. | harmful effects of water splashed against the motor from any direction |
| IP55 | harmful effects of water projected from a nozzle from any direction | ||
| IP56 | harmful quantities of water from heavy seas on ships decks entering motors | ||
METHODS OF COOLING
The cooling arrangements are in accordance with the SABS 948 (revised), lEC 34-6 and BS 4999/21. In each case, air is circulated by a fan mounted on the motor shaft.
| Code | Type Of Cooling Applicable To These Codes |
| IC 01 | External air is drawn into, and exhausted from, the motor. |
| IC 01 41 | Two separate air circuits. External air flows freely over external surface of motor frame. Internal air scrubs internal surface of motor enclosure. |
| IC 00 41 | No forced external air cooling (free convection). Internal air scrubs internal surfaces of motor enclosure. |
| IC 01 61 | Two separate air circuits through heat exchanger mounted on top of motor. External air circulates through heat exchanger. Internal air circulates through heat exchanger. |
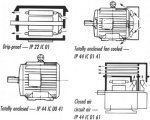
Fig 65
ENVIRONMENT
Standard site conditions as defined by SABS 948 (revised). Maximum ambient temperature 40%. Maximum altitude above sea level 1000 m. Maximum relative humidity 95%. Any excesses over the standard ambient and altitude will require consideration, outlined in table.
|
For ambient temperatures greater than 40°C but not exceeding 60°C, the percentage of rated output available is: |
For altitudes above 1000 m, but not exceeding 3000 m above sea level, the percentage of rated output available is: |
||||
| Ambient | Standard Motor Insulation Class |
Altitude asl. | Standard Motor Insulation Class |
||
| °C | B | F | m | B | F |
40 |
100 |
100 |
1000 |
100 |
100 |
41 |
99,4 |
100 |
1100 |
96,3 |
|
42 |
98,1 |
100 |
1200 |
96,0 |
|
43 |
98,0 |
100 |
1300 |
95,6 |
|
44 |
97,3 |
100 |
1400 |
95,3 |
|
45 |
96,6 |
100 |
1500 |
95,0 |
|
46 |
95,8 |
100 |
1600 |
94,6 |
|
41 |
95,1 |
100 |
1700 |
94,3 |
|
48 |
94,3 |
100 |
1800 |
94,0 |
|
49 |
93,4 |
100 |
1900 |
93,6 |
|
50 |
92,6 |
100 |
2000 |
93,3 |
|
51 |
91,7 |
100 |
2100 |
93,0 |
|
52 |
90,1 |
100 |
2200 |
92,6 |
|
53 |
89,7 |
100 |
2300 |
92,3 |
|
54 |
88,7 |
100 |
2400 |
92,0 |
|
55 |
87,7 |
99 |
2500 |
91,6 |
|
56 |
86,6 |
98 |
2600 |
91,3 |
|
51 |
85,4 |
97 |
2700 |
91,0 |
|
58 |
84,2 |
96 |
2800 |
90,6 |
|
59 |
83,0 |
95 |
2900 |
90,3 |
|
60 |
81,6 |
94 |
3000 |
90,0 |
100 |
In the case of higher ambients/altitudes - refer to works.
RELATIVE HUMIDITY (RH)
For RH higher than 95 percent, extra impregnation and bake is recommended. For 100 per cent RH at any temperature, heaters are advisable.
SITE CONDITIONS
Site conditions determine the type of enclosure to be selected (refer to page 68). For general guidance, the following enclosures apply:
| Site | Enclosure |
| Clean indoor | IP 22 |
| Outdoor | IP 44 (standard motor is weather protected) |
| Dirty indoor | IP 44/IP 54 |
| Water spray (hosepipe, etc.) | IP 45/IP 55 |
| Exposed to heavy seas on ships decks | IP 46 (extra
impregnation) i.e. intermittent short time submersion) |
| Chemical | IP 44 (chemical atmosphere works finish applied) |
| Steelworks/Mines | IP 44/IP 54 and heavy duty frames |
| Hazardous areas | Refer to installation & Maintenance |
TYPE OF CONSTRUCTION AND MOUNTING ARRANGEMENTS
The GEC range of motors is available with the type of construction and mounting arrangements indicated in fig 66 Mounting designations comply with SABS 948 (revised)

Fig 66
INSULATION CLASS
Insulation materials are arranged in 'Classes' according to the maximum permissible temperature at which the material is suitable for continuous operation. These 'classes' were determined from the result of tests which have extended from approximately 1920 onwards and, from the experience of major electrical machines manufacturers. Results were correlated and recommendations published in various national specifications, viz: lEC Publication 85 (1957) VDE 0530, Part 1/1.69 BSS 2757: 1956
|
MAXIMUM CONTINUOUS
WORKING TEMPERATURE |
|||
| Class | Rise °C |
Ambient °C |
Total °C |
| E | 75 | 40 | 115 |
| B | 80 | 40 | 120 |
| F | 100 | 40 | 140 |
| H | 125 | 40 | 165 |
These temperature rises ore as specified by SABS 948, BSS 4999, part 32, BS 2613 and VDE 0530 and apply to the temperature rise of the winding, as determined by the increase in its resistance.
STANDARD MOTORS -INSULATION CLASS
All motors (including watt motors) up to and including C/D 200 size - Class B with Class B rise.
All motor sizes C/D 225 to C/B 355 inclusive - Class F with Class B rise.
CABLE ENTRY
TERMINAL BOX POSITION (ALUMINIUM FRAME DZ 80-112 inclusive)
Terminal box is situated on top of the motor and can be positioned to point in any one of four directions at 90° to each other.
The position of cable entry on standard motors is at the right hand side, looking on shaft end as required by SABS 948.
Fig 67
TERMINAL BOX POSITION (ALUMINIUM FRAME DZ 132-180 inclusive)
(CI FRAME D/C 80.31 SM inclusive) right hand side looking on shaft end and can be positioned to point in any one of four directions at 900 to each other. See Fig 68

Fig 68
TERMINAL BOX POSITION
Cast Iron Frame 80 - 315
The terminal box is situated on top of the motor and can be positioned to point in any one of four directions at 90° to each other.
Fig 69
TERMINAL BOX POSITION C/D 355
Terminal box is situated on right hand side looking on shaft end and can be positioned to point in any one of four directions at 90 to each other.
A blank flange is available on the opposite side for the LI-I mounted box when required. This must be stated when ordering.
Fig 70
ROTATION
The standard direction of rotation is clockwise looking on shaft end as required by SABS 1804.
This is achieved when the alphabetical sequence on the phase groups, corresponds to the time sequence of the supply.
All motors are BI - DIRECTIONAL from 80 to 315 - all poles and 355 sizes inclusive 4, 6, 8, 10, 12 poles
Only the 355 2-pole is uni-directional
They have uni-directional fans, and will be delivered suitable for the standard direction of rotation, unless advised otherwise at the order stage.
TO REVERSE ROTATION
Opposite direction of rotation can be obtained by: 6 ENDS OUT
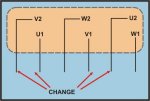
Fig 70a
Change-over the leads going to U1 and V1 also change-over the leads going to U2 and V2
3 ENDS OUT
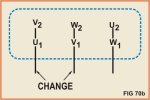
Fig 70b
Change-over the leads going to U1 and V1
METHOD OF START
TERMINOLOGY
The terms given in italics ore those given in SABS 948 (revised). Also given are common alternatives.
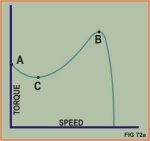
Fig. 72a Point A Breakaway torque stalled torque - starting torque
The torque developed when the rotor is stationary and when the motor is supplied with rated volts and frequency, transient phenomena being ignored.
Point B Pull-out torque maximum torque - stalling torque The maximum torque that can be applied beyond full load torque, before the motor pulls out. Refer Fig. 72b. The lowest torque developed between zero speed and the speed corresponding to the pull-out torque.
Point D Breakaway starting current starting current - stalled current -locked rotor current
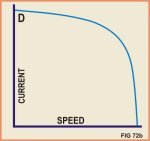
Fig. 72b Point C Pull-up torque run up torque
The rms current drawn by the motor when the rotor is stationary, and the motor is supplied with rated volts and frequency, transient phenomena being ignored.
DIRECT ON LINE
Full volts is switched directly onto the motor terminals.
Starting torque and current in the order of 200 and 600 percent full load values respectively on small motors.
As copper losses are proportional to current squared during start, copper losses are in the order of 36 times normal. Therefore, frequent starting or starting against high inertia loads by DOL method should not be undertaken without reference to Motor Sales Department.
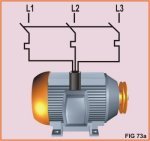
Fig 73a
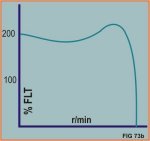
Fig 73b Typical torque speed curve
STAR-DELTA START
The starter connects the six terminal motor first into star (contacts A close) then after an adjustable time period into delta (contacts A open and contacts B close).
Starting torque and current are between one third to one quarter of the equivalent DOL value.
|
Fig 74a |
Fig 74b |
Fig 74 Figures 74a and 74b indicate two features to be guarded against when using star-delta start.
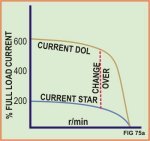
Fig 75a Change-over from star into delta at too low a speed results in a current surge which rises almost to the DOL value.
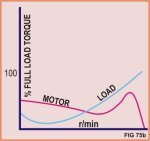
Fig 75b Mismatching of motor torque speed curve and the load torque speed curve. In the example shown, the motor would crawl at approximately 50 percent rated speed.
AUTO-TRANSFORMER STARTING
To provide low voltage starting, the secondary voltage of an auto-transformer is tapped off, usually at approximately 50, 65 and 80 percent of full volts.
Only one tapping is used, depending upon the starting torque/current required.
NOTE: Starting torque and current reduce approximately as the square of the reduction in volts.
Fig 76a

Fig 76b Typical torque speed curve
STATORMATIC STARTING
A tank of electrolyte, the resistance of which reduces as temperature increases, is connected in series with each supply line.
As starting current flows, the electrolyte heats and its resistance falls. The voltage at the motor terminals gradually increases from a pre-set minimum value, resulting in a rising torque/speed curve. At full speed the tanks are shorted out.
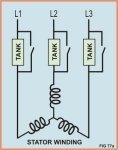
Fig 77a

Fig 77b Comparison of Dol, Star and Statormatic Torque speed curves.
Advantages
- The rising torque/speed characteristic.
- Negligible transient when shorting out tanks.
ACCELERATING TIME
Two factors are necessary to facilitate calculation of accelerating time.
- Average accelerating torque.
- Total inertia, which is the sum of:
- referred value of load inertia,
- motor inertia.
1. Average Accelerating Torque
Average accelerating torque is equal to the average height that the developed motor torque lies above the load torque, during the run-up period.
i.e. average accelerating torque = average height of the shaded area in the diagrams below.
If either the motor torque/speed curve, or the load torque speed curve, are not available, then, to obtain a first approximation of accelerating time, use:
DOL Start - average accelerating torque = 100% FLT
STAR-DELTA Start - average accelerating torque = 25% FLT
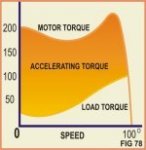
Fig 78a Direct on-line starting of fan
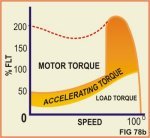
Fig 78b Star Delta starting of fan
2a. Referred Value of Load Inertia
If the load speed differs from the motor speed, the load inertia must be referred to the motor speed.
| referred inertia = actual inertia x | ( | load speed | )2 |
| motor speed |
2b. Motor inertia
This is available from motor performance tables.
Accelerating time:
If total inertia I = MK2 (kg m2) where M = mass (kg) where K = radius of gyration (m) Therefore
accelerating time = (
IN )2
93T where N = motor r/min where T = av. acc. torque (kgm)
If total inertia I = GD2 (kg m2) where M = mass (kg) where K = diameter of gyration (m) Therefore
accelerating time = (
IN )2
37.2T where N = motor r/min where T = av. acc. torque (N.m)
If total inertia I = MK2 (lb ft2) where M = mass (lb) where K = radius of gyration (ft) Therefore
accelerating time = (
IN )2
308T where N = motor r/min where T = av. acc. torque (lbft) ALSO:-
RUT =
2π x IN 60 T DUTY
The duty of a motor is an account of the duration and magnitude of loads, no load periods, and rest periods, to which it is subjected.
Necessary information required to assess duty suitability:
- Load inertia referred to motor speed
- Number of starts per hour
- Magnitude of load
- Duration of load
- Number of stops per hour
- Method of stopping mechanical brake reverse current DC injection
- Details of any no-load periods.
Cyclic Duration Factor (usually expressed as a percentage) is:
The ratio of the period of loading to the period of a complete cycle (the period of loading includes starting and electric braking).
SABS 948 (revised), BSS 4999, part 30, VDE 0530 and CENEL 2B/3, have classified the duty of a motor as:
S1 - Continuous Running Duty
Operation at constant load indefinitely.
Fig 79 N = operation at rated load
S2 - Short Time Duty
Operation at constant load for a specific time
e.g. S2 - 30 minutes, after which the motor must cool to ambient temperature before re-starting.

Fig 80 N = operation at rated load
S3 - Intermittent Periodic Duty
A sequence of identical duty cycles, each including a period of operation at constant load plus a rest and de-energised period.
The abbreviation S3 is followed by the cyclic duration factor

Fig 81
N = operated at rated load R = at rest and de-energised Cyclic duration factor = N N + R e.g. 53 - 25 percent.
S4 - Intermittent Periodic Duty
A sequence of identical duty cycles, each consisting of a period of starting, a period of operation at constant load and a rest and de-energised period.
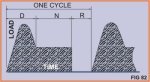
Fig 82
D = starting N = operated at rated load R = at rest and de-energised Cyclic duration factor = D + N D + N + R The abbreviation S4 is followed by the cyclic duration factor
e.g. S4 - 25 percent.
S5 - Intermittent Periodic Duty with starting and electric braking
A sequence of identical duty cycles, each cycle consisting of a period of starting, a period of operation at constant load, a period of rapid electric braking and a rest and de-energised period.
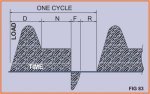
Fig 83
D = starting N = operated at rated load R = at rest and de-energised Cyclic duration factor = D + N + F D + N + F + R The abbreviation S5 is followed by the cyclic duration factor
e.g. S5 - 40 percent.
S6 - Continuous Operation Duty
A sequence of identical duty cycles, each consisting of a period of operation at constant load and a period of operation on no load (i.e. motor still running but unloaded).
The abbreviation S6 is followed by the cyclic duration factor
e.g. S6 - 40 percent.
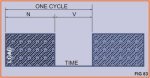
Fig 84
N = operation at rated load V = operation on no load Cyclic duration factor = N N + V DUTY CYCLE - RMS VALUE
Before proceeding to determine the rms value of a duty cycle, it is essential to establish whether the cycle consists of periods of acceleration and/or deceleration. Over these periods, the average speed is approximately half full speed and therefore allowance must be made for the reduced cooling - unless the motor is force ventilated. The efficiency of cooling is even more reduced when the motor is stationary.
To take account of this, the rms value of a duty cycle is corrected by a factor which represents the difference between the average dissipation of heat throughout the cycle and the dissipation at constant speed. This factor depends upon the percentage of time of acceleration / deceleration or rest. During acceleration or deceleration, cooling is assumed to be two-thirds of that at full speed, while at standstill, the cooling is assumed to be one-third of that at full speed.
These corrections are self-evident in the following formula:
rms torque =
where M represents torque and t represents time.
NOTE: With some duty cycles, the rating of the motor is determined by the maximum torque required, not by the rms value of the duty cycle.
For example: a peoky cycle such as that shown would have a very low rms value. A motor rated at this rms value would have insufficient overload capacity to handle the maximum torque.

Fig 85a
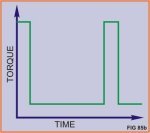
Fig 85b
STARTING CLASS
The starting class for a motor indicates the maximum permissible number of starts per hour distinguishing between
complete starts,
jogs,
electric braking.It is assumed that
one jog is thermally equal to 25 percent of a complete start,
one reverse current braking operation to one third of rated speed is thermally equal to 80 percent of a complete start.
| Starting | Cyclic operation | |||||
| Equivalent starting duties | ||||||
|
Starting |
No of starts |
|
No of jogs |
|
No of brakings |
Percent classes |
| 150 | + | 0 | + | 0 | ||
|
Standard |
100 | + | 200 | + | 0 | 25, 40, 60 |
| 65 | + | 130 | + | 65 | ||
| 300 | + | 0 | + | 0 | ||
|
300 |
200 | + | 400 | + | 0 | 40, 60 |
| 130 | + | 260 | + | 130 | ||
| 600 | + | 0 | + | 0 | ||
|
600 |
400 | + | 800 | + | 0 | 60 |
| 260 | + | 520 | + | 260 | ||
MOTOR SELECTION
HOISTING DUTY
The kW required to hoist a specific mass, con be calculated from:
kW= Mv 102π Where
M = mass to be lifted (kilograms)
V = velocity of lift (m/sec)
π = mechanical per unit efficiency of hoist.HORIZONTAL DUTY
The kW required to move a specific mass in a horizontal direction can be calculated from:
| kW = | MπV |
| 102 |
Where
M = mass to be moved in metric tons)
= friction factor (in kg per metric ton)
V = linear velocity (in metres/second)
π = mechanical per unit efficiency.GENERAL INFORMATION
THERMISTORS
Thermistors are miniature semi-conductors (aspirin size or smaller), which are introduced into the stator winding overhang of an induction motor.
Protection devices range from simple mass produced thermal relays, to expensive precision instruments. Whichever is determined by economics, comparing the cost of production with the cost of the motor, or loss of production due to a failure.
Cases of failure are categorised as follows:
a. overload*
b. stolling*
c. excessive accelerating times*
d. frequent starting, inching or plug reversing*
e. single phasing*
f. overvoltage or undervoltage*
g. unbalanced supply voltage*
h. high ambient temperature*
j. blocked ventilation*
k. incorrect enclosure
l. ingress of moisture
m. bearing failure - misalignment - mechanical overload - contamination.NOTE: Not all of the above reflect an increase in line current; most, however, are detected by an increase in temperature.
* Thermistors offer protection against items (a) to (j) inclusive.
The advantages of thermistors - particularly those having a positive tempera-tore coefficient of resistance - for the thermal protection of windings, stem from two particular characteristics, as follows:

Fig 86 Thermistor being inserted in the stator winding overhang.
RESISTANCE CHARACTERISTICS
The resistance of the thermistor is relatively low at normal temperatures and remains nearly constant up to a critical value, selected for the class of winding insulation that is to be protected. At this point, even a slight increase in temperature will cause the resistance of the thermistor to rise to a value up to several hundred times its normal value when cold. This sudden increase of resistance is easily interpreted into a positive switching action.
The positive characteristic, i.e. resistance increase with temperature, achieves inherent safety; an open circuit of a thermistor will have the same effect as an unsafe temperature.

Fig 87 Typical temperature-resistance curve for thermistor.
PHYSICAL CHARACTERISTICS
The small size of the thermistor enables it to be installed in intimate contact with the stator windings, and its low thermal inertia gives rapid and accurate response to winding temperature changes. Thermistors, being robust solid-state devices, are inserted between the conductors of the end windings during winding (see fig. 86); subsequent varnish impregnation and baking makes them an integral mass with the winding.
Three-phase motors usually hove one thermistor fitted per phase, the thermistors being connected in series with each other and also to a control unit. When actuated by a sudden change in the resistance of the thermistor circuit at the critical temperature, the control unit will disconnect the main supply through the main contactor or operate a warning device. After cooling by approximately 5°C the winding can be re-energised either manually or automatically. This means that the motor can be returned to service with the minimum of delay, as shown in figures. 88 and 89.
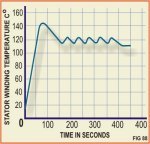
Fig 88
Curve showing temperature-time relationship of a GEC 18,6 kW thermistor-protected motor subjected to a locked-rotor test from cold (stator winding re-energised automatically). Note the initial overshoot of temperature which the winding and insulation system must withstand.
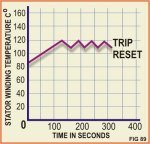
Fig 89
Curve showing temperature-time relationship of the same motor as in fig. c, running at 100% overload windings initially hot. Note the small differential between the 'tripping' and 'resetting' temperature.HEATERS
Moisture attacks insulation and causes insulation failure. Breakdown may occur when the windings are energised. Insulation therefore deteriorates under conditions involving long idle periods, combined with high humidity and widely varying ambients.
Standby motors fail to operate when they are needed - motors installed twelve months before start-up, fail on commissioning.
It should also be noted that leads carrying supply to the motors also absorb moisture.
Under high humidity conditions with widely varying ambient temperature and/or where a motor is expected to suffer long idle periods, additional impregnation treatment of the winding, p1us some form of anti-condensation heater is recommended. This can be achieved by either (a) low voltage heating or (b) fitting heaters.
a) LOW VOLTAGE HEATING
This involves connecting a single phase, low voltage (5 to 7,5 per cent of motor terminal voltage) across two of the three leads of the 3 phase motor, while the motor is inoperative.
This method is very effective, but necessitates a low voltage transformer. It obviates the problem of failed heaters, going undetected, plus the down-time associated with replacing a heater inside the motor.
b) INTERNALLY FITTED HEATERS
The standard heater, fitted on 80 to 315 sizes, consists of a glass fibre tape with the heating element integrally woven into it. This tape is then fitted inside a silicon impregnated glass fibre sleeve.
The tape heater is then wrapped around the stator winding overhang, braced and completely impregnated with the stator winding.
Two leads ore brought out to the inside of the main terminal box, unless otherwise requested, to provide a separate heater terminal box.
| Heater Rating (watts) | ||||||||||
| Motor size | 100 | 112 | 132 | 160 | 180 | 200 | 225 | 250 | 280 | 315 |
| Watts | 25 | 25 | 40 | 40 | 65 | 65 | 130 | 130 | 200 | 200 |
Heater supply 220/250 volts, single phase. Tape type by surface heating

Fig 90 Anti-condensation heater
| RECOMMENDED RATINGS OF ENGLISH ELECTRIC H.R.C. FUSE-LINKS FOR MOTOR PROTECTION | ||||||||||
| kW | 380 Volt 3-phase | 433 Volt 3-Phase | 525 Volt 3-Phase | kW | ||||||
| Full
load current amps |
Fuse rating amps Starting |
Full
load current amps |
Fuse rating amps Starting |
Full
load current amps |
Fuse rating amps Starting |
|||||
| A | B | A | B | A | B | |||||
|
0.75 |
2.1 |
10 |
4 |
1.8 |
6 |
4 |
1.6 |
6 |
2 |
0.75 |
|
1.1 |
2.7 |
15 |
6 |
2.3 |
10 |
6 |
2.0 |
10 |
4 |
1.1 |
|
1.5 |
3.1 |
15 |
10 |
3.3 |
15 |
6 |
2.8 |
15 |
6 |
1.5 |
|
2.2 |
5.3 |
20 |
15 |
4.6 |
15 |
10 |
4.0 |
15 |
10 |
2.2 |
|
3.0 |
6.9 |
20 |
16 |
6.1 |
20 |
16 |
5.0 |
16 |
10 |
3.0 |
|
4.0 |
8.7 |
25 |
16 |
7.6 |
25 |
16 |
6.3 |
20 |
16 |
4.0 |
|
5.5 |
12.6 |
35 |
20 |
11.0 |
30 |
20 |
9.6 |
25 |
15 |
5.5 |
|
7.5 |
15.8 |
40 |
25 |
13.8 |
35 |
20 |
12.0 |
35 |
20 |
7.5 |
|
11.0 |
23 |
60 |
35 |
20.2 |
50 |
30 |
17.5 |
40 |
25 |
11.0 |
|
15.0 |
31 |
80 |
40 |
27.0 |
60 |
35 |
23.5 |
60 |
35 |
15.0 |
|
18.5 |
38 |
80 |
50 |
34 |
80 |
40 |
29 |
80 |
35 |
18.5 |
|
22 |
45 |
100 |
60 |
40 |
80 |
50 |
35 |
80 |
40 |
22 |
|
30 |
61 |
125 |
80 |
54 |
100 |
60 |
41 |
100 |
60 |
30 |
|
33 |
68 |
125 |
80 |
60 |
125 |
80 |
52 |
100 |
60 |
33 |
|
37 |
76 |
150 |
100 |
61 |
125 |
80 |
58 |
125 |
80 |
37 |
|
45 |
91 |
150 |
100 |
80 |
150 |
100 |
69 |
125 |
80 |
45 |
|
55 |
113 |
200 |
125 |
100 |
200 |
125 |
87 |
150 |
100 |
55 |
|
75 |
149 |
250 |
150 |
131 |
250 |
150 |
114 |
200 |
125 |
75 |
|
90 |
186 |
350 |
250 |
166 |
300 |
200 |
142 |
250 |
150 |
90 |
|
110 |
218 |
350 |
150 |
190 |
350 |
250 |
166 |
300 |
200 |
110 |
|
132 |
252 |
350 |
350 |
222 |
350 |
250 |
193 |
350 |
250 |
132 |
|
150 |
288 |
400 |
350 |
252 |
350 |
350 |
219 |
350 |
250 |
150 |
|
200 |
420 |
500 |
450 |
370 |
500 |
450 |
318 |
450 |
350 |
200 |
Starting A - This covers direct-on-line starting based on 1 a motor full lead current for 10 seconds.
Starting B - This covers assisted starting based on 3,5 x motor full load current far 20 seconds.NOTE: Contact GEC Controls (Pty) Ltd., for recommended fuse ratings to protect motors with starting conditions different from those mentioned above. Full load currents given are the average of figures supplied by various South African, British and Continental motor manufacturers.
Power Factor Correction
cos r1 = Initial power factor
cos r2 = Required power factorTo correct the power factor from cos r1 to cos r2
Capacitor kVAr required
= input kW x (tan r1 - tan r2) -- EQ.1
The adjacent table gives values of (tan r1 - tan r2) for power factors from 0,5 upwards and it is only necessary to multiply the kW input by the factor given to obtain the required capacitor kVAr.
NOTE:
1. If the capacitor kVAr exceeds 90 per cent of the no-load kVA, then the capacitor must be connected at the supply side of the motor starter and incorporate its own isolating switch. This is to avoid the possibility of the capacitor (if connected across the motor terminals) causing high voltage and regenerative braking, which can cause terminal flashover and shaft failure.
If the capacitor kVAr is below 90 per cent of the no Iood kVA~ the capacitor can be connected directly across the motor terminals.
2. Input kW are computed as follows:
Output kW Efficiency per unit Example:
A 90kw motor has a full load power factor of 0,79 and an efficiency at full load of 93 per cent. Power factor to be corrected to 0,9.
Input kW = Output kW Efficiency per unit = 90 0.93 = 96.77 kW From selection table multiplying Factor = 0.29 kVAr = 96.77 x 0.29 = 28.06
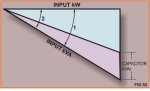
Fig 92
CAPACITOR kVAr REQUIRED PER UNIT kW INPUT FOR POWER FACTOR CORRECTION
| INITIAL
POWER FACTOR |
POWER FACTOR REQUIRED | |||||||||||||||
| 0.85 | 0.86 | 0.87 | 0.88 | 0.89 | 0.90 | 0.91 | 0.92 | 0.93 | 0.94 | 0.95 | 0.96 | 0.97 | 0.98 | 0.99 | 1.0 | |
| 0.50 | 1.11 | 1.16 | 1.17 | 1.19 | 1.22 | 1.25 | 1.28 | 1.31 | 1.34 | 1.37 | 1.40 | 1.44 | 1.49 | 1.53 | 1.60 | 1.73 |
| 0.51 | 1.07 | 110 | 1.12 | 1.15 | 1.18 | 1.21 | 1.24 | 1.26 | 1.29 | 1.33 | 1.36 | 1.40 | 1.44 | 1.49 | 1.55 | 1.69 |
| 0.52 | 1.02 | 1.05 | 1.08 | 1.11 | 1.14 | 1.16 | 1.19 | 1.22 | 125 | 1.28 | 1.32 | 1.36 | 1.40 | 1.45 | 151 | 1.65 |
| 0.53 | 1.98 | 1.01 | 1.04 | 1.07 | 1.09 | 1.12 | 1.15 | 1.18 | 1.21 | 1.24 | 1.28 | 1.32 | 136 | 1.41 | 1.47 | 1.60 |
| 0.54 | 0.94 | 0.97 | 1,00 | 1.02 | 1,05 | 1.08 | 1.11 | 1.14 | 1.17 | 1.20 | 1.23 | 1.27 | 1.32 | 1.31 | 1.43 | 1.57 |
| 0,55 | 0.90 | 0.93 | 0.96 | 098 | 1.01 | 1.04 | 1.07 | 1.10 | 1.13 | 1.16 | 1.20 | 1.23 | 1.28 | 1.33 | 1.38 | 1.53 |
| 0,56 | 0.86 | 0.89 | 0.91 | 0.94 | 0.97 | 1.00 | 1.03 | 1.06 | 1.09 | 112 | 1.15 | 1.19 | 1.24 | 1.29 | 1.34 | 1.48 |
| 0.57 | 0.82 | 0.85 | 0.88 | 0.91 | 0.94 | 0.96 | 0.99 | 1.02 | 1.05 | 108 | 1.12 | 1.16 | 1.20 | 1.25 | 1.31 | 1.45 |
| 0.58 | 0,79 | 0.81 | 0.84 | 0.81 | 0.90 | 0.93 | 0.95 | 0.98 | 1,01 | 1.05 | 1.08 | 1.12 | 1.16 | 1.21 | 1.27 | 1.41 |
| 0.59 | 0.75 | 0.78 | 0.80 | 0,83 | 0,86 | 0.89 | 0.92 | 0.95 | 0.98 | 1.01 | 1.04 | 1.08 | 1.12 | 1.11 | 1.23 | 1,37 |
| 0.60 | 0.71 | 0,74 | 0.77 | 0.80 | 0,82 | 0.85 | 0.88 | 0.91 | 0,94 | 0,97 | 101 | 1.05 | 1.09 | 1.14 | 1,20 | 1.34 |
| 0.61 | 0.68 | 0.71 | 0.13 | 0.76 | 0,79 | 0.82 | 0.85 | 0.87 | 0.90 | 0.94 | 0.97 | 1.01 | 1.05 | 1.10 | 1.16 | 1.30 |
| 0.62 | 0.65 | 0,61 | 0.70 | 0.73 | 0.75 | 0.78 | 0.81 | 0.84 | 0.87 | 090 | 0.94 | 0.98 | 1.02 | 1.07 | 1.13 | 1.27 |
| 0.63 | 0,61 | 0.64 | 0.67 | 0,69 | 0.12 | 075 | 0.78 | 0.81 | 0.84 | 0.87 | 0.90 | 0.94 | 0.99 | 1.03 | 1,09 | 1.24 |
| 0.64 | 0.58 | 0.61 | 0.63 | 0.65 | 0.69 | 0.12 | 0.75 | 0.77 | 0.80 | 0.84 | 0.87 | 0.91 | 0.95 | 1.00 | 1.06 | 1.20 |
| 0.65 | 0.55 | 0.51 | 0.60 | 0.63 | 0.66 | 0.69 | 0.71 | 0.74 | 0.77 | 0.81 | 0.84 | 0.88 | 0.92 | 0.97 | 1.03 | 1.11 |
| 0.66 | 0.52 | 0.55 | 0.57 | 0.60 | 0.63 | 0.66 | 0.68 | 0.71 | 0.74 | 0.78 | 0.81 | 0.85 | 0.89 | 0.94 | 1.00 | 1.14 |
| 0.67 | 0.49 | 0.51 | 0.54 | 0.57 | 0.60 | 0.63 | 0.65 | 0.68 | 031 | 0,75 | 0.78 | 0.82 | 0.86 | 0.91 | 0.97 | 1.11 |
| 0.68 | 0.46 | 0,48 | 0.51 | 0.54 | 0.57 | 0.60 | 0.62 | 0.65 | 0.68 | 0.72 | 0.75 | 0.79 | 0.83 | 0.88 | 0.94 | 1.08 |
| 0.69 | 0.43 | 0.46 | 0.48 | 0.51 | 0.54 | 0.57 | 0.60 | 0.62 | 0.65 | 0.69 | 0.72 | 0.16 | 0.80 | 0.85 | 0.91 | 1.05 |
| 0.10 | 0,40 | 0,43 | 0,46 | 0.48 | 0.51 | 0.54 | 0.57 | 0.60 | 0.63 | 0.66 | 0.10 | 0.13 | 0.78 | 0.83 | 0.88 | 1.03 |
| 0.71 | 0.37 | 0.40 | 0.43 | 0.45 | 0.48 | 0.51 | 0.54 | 0.57 | 0.60 | 0.63 | 0.67 | 0.10 | 0.75 | 0.80 | 0.85 | 1.00 |
| 0.72 | 0.34 | 0.37 | 0.40 | 0.43 | 0.45 | 0.48 | 0.51 | 0,54 | 0.57 | 0.60 | 0.64 | 0.68 | 0.72 | 0,77 | 0.83 | 0.97 |
| 0.73 | 0.32 | 0.34 | 0.37 | 0.40 | 0.43 | 0.45 | 0.48 | 0.51 | 0.54 | 0.57 | 0.61 | 0.65 | 0.69 | 0.74 | 0.80 | 0.94 |
| 0.74 | 0.29 | 0.32 | 0.34 | 0.31 | 0.40 | 0.43 | 0.45 | 0.48 | 0.51 | 0.55 | 0.58 | 0.62 | 0.66 | 0.71 | 0.17 | 0.91 |
| 0.75 | 0.26 | 0.29 | 0.32 | 0.34 | 0.37 | 0.40 | 0.43 | 0.45 | 0.49 | 0.52 | 0.55 | 0.59 | 0.64 | 0.68 | 0,74 | 0.89 |
| 0.16 | 0.23 | 0.26 | 0.29 | 0.32 | 0.34 | 0.31 | 0.40 | 0.43 | 0.46 | 0.49 | 0.53 | 0.57 | 0.61 | 0.66 | 0.72 | 0.86 |
| 0.77 | 0.21 | 0.23 | 0.26 | 0.29 | 0.32 | 0.34 | 0.37 | 0.40 | 0.43 | 0.41 | 0.50 | 0.54 | 0.58 | 0.63 | 0.69 | 0,83 |
| 0.18 | 0.18 | 0.21 | 0.23 | 0.26 | 0.29 | 0.32 | 0.35 | 0.38 | 0.41 | 0.44 | 0.48 | 0.51 | 0.55 | 0.60 | 0.66 | 0.80 |
| 0.19 | 0.15 | 0.18 | 0.21 | 0.23 | 0.26 | 0.29 | 0.32 | 0.35 | 0.38 | 0,41 | 0.45 | 0.49 | 0.53 | 0.58 | 0.64 | 0.78 |
| 0.80 | 0.13 | 0.15 | 0.18 | 0.21 | 0.24 | 0.27 | 0.29 | 0.32 | 0.35 | 0.39 | 0.42 | 0.46 | 0.50 | 0.55 | 0.61 | 0.75 |
| 0.81 | 0.10 | 0.13 | 0.16 | 0.18 | 0.21 | 0.24 | 0.21 | 0.30 | 0.33 | 0.36 | 0.40 | 0.44 | 0.48 | 0.53 | 0.59 | 0.73 |
| 0.82 | 0.08 | 0.10 | 0.13 | 0.16 | 0.19 | 0.22 | 0.24 | 0.27 | 0.30 | 0.34 | 0.37 | 0.41 | 0.45 | 0.50 | 0.56 | 0.70 |
| 0.83 | 0.05 | 0.08 | 0.10 | 0.13 | 0.16 | 0.19 | 0.22 | 0.25 | 0.28 | 0.31 | 0.35 | 0.38 | 0.43 | 0.48 | 0.53 | 0.68 |
| 0.84 | 0.03 | 0.05 | 0.08 | 0.11 | 0.14 | 0.16 | 0.19 | 0.22 | 0.25 | 0.28 | 0.32 | 0.36 | 0.40 | 0.45 | 0.51 | 0.65 |
| 0.85 | - | 0.03 | 0.05 | 0.08 | 0.11 | 0.14 | 0.11 | 0.20 | 0.23 | 0.26 | 0.29 | 0.33 | 0.38 | 0.42 | 0.48 | 0.62 |
| 0.86 | - | - | 0.03 | 0.05 | 0.08 | 0.11 | 0.14 | 0.11 | 0.20 | 0.23 | 0.27 | 0.31 | 0.35 | 0.45 | 0.46 | 0.60 |
| 0.87 | - | - | - | 0.03 | 0.05 | 0.08 | 0.11 | 0.14 | 0.17 | 0.20 | 0.24 | 0.28 | 0.32 | 0.37 | 0.43 | 0.57 |
| 0.88 | - | - | - | - | 0.03 | 0.06 | 0.09 | 0.11 | 0.14 | 0.18 | 0.21 | 0.25 | 0.29 | 0.34 | 0.40 | 0.54 |
| 0.89 | - | - | - | - | - | 0.03 | 0.06 | 0.09 | 0.12 | 0.15 | 0.18 | 0.22 | 0.26 | 0.31 | 0.37 | 0.51 |
| 0.90 | - | - | - | - | - | - | 0.03 | 0.06 | 0.09 | 0.12 | 0.16 | 0.20 | 0.24 | 0.29 | 0.35 | 0.49 |
| 0.91 | - | - | - | - | - | - | - | 0.03 | 0.06 | 0.09 | 0.13 | 0.17 | 0.21 | 0.26 | 0.32 | 0.46 |
| 0.92 | - | - | - | - | - | - | - | - | 0.03 | 0.06 | 0.10 | 0.14 | 0.18 | 0.23 | 0.29 | 0.43 |
| 0.93 | - | - | - | - | - | - | - | - | - | 0.03 | 0.07 | 0.11 | 0.15 | 0.20 | 0.26 | 0.40. |
| 0.94 | - | - | - | - | - | - | - | - | - | - | 0.04 | 0.08 | 0.12 | 0.17 | 0.22 | 0.37 |
| 0.95 | - | - | - | - | - | - | - | - | - | - | - | 0.04 | 0.08 | 0.13 | 0.19 | 0.33 |
| 0.96 | - | - | - | - | - | - | - | - | - | - | - | - | 0.04 | 0.09 | 0.15 | 0.29 |
| 0.97 | - | - | - | - | - | - | - | - | - | - | - | - | - | 0.05 | 0.11 | 0.25 |
| 0.98 | - | - | - | - | - | - | - | - | - | - | - | - | - | - | 0.06 | 0.20 |
| 0.99 | - | - | - | - | - | - | - | - | - | - | - | - | - | - | - | 0.14 |
NOISE LEVELS
No load sound pressure and sound power levels for TEFC 3 phase, 50Hz motors.
Sound Pressure Reference is 2 x 10-5 N/m2
Sound Power Reference is 10-12 watts
Sound Pressure measured at 3 metre reference radius.
For 1 metre radius, at mean sound pressure add 9.5 dBSynchronous Speed: 3000 r/min.
| Frame Size |
Output (kW) |
Motor Sound Motor dB (ESCOM) |
Mean Sound Pressure (dB) A |
Noise
pressure spectrum readings (dB) at mid band frequencies (Hz) of: |
|||||||
| 63 | 125 | 250 | 500 | 1000 | 2000 | 4000 | 8000 | ||||
| 80 | 0.75 | ||||||||||
| 80 | 1.1 | ||||||||||
| 90S | 1.5 | ||||||||||
| D90L | 2.2 | 73 | 5S.2 | 54 | 44.2 | 51.4 | 50.8 | 50.6 | 48.7 | 45.8 | 38.5 |
| D100L | 3.0 | 78 | 60 | 78.7 | 72.5 | 75 | 73.5 | 72.8 | 70.4 | 66.3 | 62.2 |
| D112M | 4.0 | 78 | 60 | 78.7 | 72.5 | 75 | 73.5 | 72.8 | 70.4 | 66.3 | 62.2 |
| D132S | 5.5 | 84 | 66.2 | 74.8 | 64.8 | 59.5 | 63.2 | 60.2 | 59.1 | 58 | 50.3 |
| D1325 | 7.5 | 84 | 66.2 | 74.8 | 64.8 | 59.5 | 63.2 | 60.2 | 59.1 | 58 | 50.3 |
| D160M | 11 | 89.5 | 71.5 | 72.5 | 70 | 63 | 67 | 66.5 | 66.5 | 61 | 54.5 |
| D160M | 15 | 89.5 | 71.5 | 72.5 | 70 | 63 | 67 | 66.5 | 66.5 | 61 | 54.5 |
| D160L | 18.5 | 89.5 | 71.5 | 72.5 | 70 | 63 | 67 | 66.5 | 66.5 | 61 | 54.5 |
| D8180M | 22 | 97.5 | 79.5 | 74.5 | 69 | 67.5 | 75 | 75 | 74.5 | 67 | 60 |
| D200L | 30 | 101.5 | 83.5 | 78.5 | 75 | 72.5 | 78 | 79.5 | 78 | 71 | 63.5 |
| D200L | 37 | 101.5 | 83.5 | 78 | 75 | 72.5 | 78 | 79.5 | 78 | 71 | 63.5 |
| D225M | 45 | 102 | 84 | 81.5 | 79 | 77.5 | 79 | 80.5 | 78 | 71 | 64.5 |
| D250S | 55 | 99 | 81.5 | 61 | 62.5 | 72.5 | 79 | 77.5 | 73.5 | 69 | 64 |
| D250M | 75 | 98 | 80.5 | 60 | 59 | 71 | 78 | 77 | 70 | 66 | 68 |
| D2805 | 90 | ||||||||||
| D280M | 110 | 103 | 85.5 | 72 | 62 | 74.5 | 83.5 | 82.5 | 77 | 74.5 | 68.5 |
| D315S | 132 | 106 | 88.5 | 67 | 65 | 76.5 | 84 | 83 | 82 | 76.5 | 68 |
| D315M | 150 | 106.5 | 89 | 69.5 | 66.5 | 76 | 84 | 85 | 82.5 | 77 | 74.5 |
| D315MX | 200 | ||||||||||
| D315MXB | |||||||||||
Synchronous Speed: 1500 r/min
| Frame Size |
Output (kW) |
Motor Sound Motor dB (ESCOM) |
Mean Sound Pressure (dB) A |
Noise
pressure spectrum readings (dB) at mid band frequencies (Hz) of: |
|||||||
| 63 | 125 | 250 | 500 | 1000 | 2000 | 4000 | 8000 | ||||
| 80 | 0,75 | ||||||||||
| 90S | 1,1 | ||||||||||
| D90L | 1,5 | 62 | 44,1 | 33,9 | 35,5 | 34,3 | 36,1 | 36,1 | 40,3 | 36,2 | 25,5 |
| D100L | 2,2 | 62 | 44 | 35,4 | 36,3 | 39,4 | 39,2 | 39,2 | 38,5 | 38,3 | 23,6 |
| D100L | 3,0 | 62 | 44 | 35,4 | 36,3 | 39,4 | 39,2 | 39,2 | 38,9 | 38,3 | 23,6 |
| D112M | 40 | 62 | 44 | 35,4 | 36,3 | 39,4 | 39,2 | 39,2 | 38,9 | 38,3 | 23,6 |
| D132A | 5,5 | 72 | 54,3 | 51,8 | 50,4 | 42,6 | 50,2 | 47 | 50,2 | 42,1 | 29,3 |
| D132M | 7,5 | 72 | 54,3 | 51,8 | 50,4 | 42,6 | 50,2 | 47 | 50,2 | 42,1 | 29,3 |
| D16DM | 11 | 15 | 57 | 57,5 | 51 | 51,3 | 51 | 53,3 | 50,5 | 44 | 35 |
| D160L | 15 | 75 | 57 | 57,5 | 51 | 51,3 | 51 | 53,5 | 50,5 | 44 | 35 |
| D18DM | 18,5 | 79,5 | 61,5 | 57 | 51 | 55 | 59,5 | 58 | 53 | 45 | 38 |
| D180L | 22 | 79,5 | 61,5 | 57 | 51 | 55 | 59,5 | 58 | 53 | 45 | 38 |
| D200L | 30 | 83,5 | 65,5 | 63,5 | 58,5 | 59 | 64. | 61,5 | 57 | SO | 43 |
| D225S | 37 | 88,5 | 70,5 | 68,5 | 65 | 63 | 66,5 | 68 | 61,5 | 54,5 | 50,5 |
| D225M | 45 | 88,5 | 70,5 | 68,5 | 65 | 63 | 66,5 | 68 | 61,5 | 54,5 | 50,5 |
| D250S | 55 | 90,5 | 73 | 60 | 56,5 | 70 | 71,5 | 68 | 62 | 58,5 | 55,5 |
| D25DM | 75 | ||||||||||
| D280S | 90 | 91,5 | 74 | 60 | 58 | 70 | 71,5 | 68,5 | 65 | 58,5 | 54,4 |
| D28DM | 110 | 93 | 75,5 | 62,5 | 64 | 67 | 72,5 | 71 | 68 | 61 | 56,5 |
| D315S | 132 | 98 | 80,5 | 64,5 | 64,5 | 72 | 77,5 | 77 | 73,5 | 63 | 57,5 |
| D315M | 150 | 97,5 | 80 | 61 | 60,5 | 73 | 78,5 | 76,5 | 70 | 63 | 60 |
| D315MX | 200 | ||||||||||
| D315MXB | 220 | ||||||||||
Synchronous Speed: 1 000 r/min.
| Frame Size |
Output (kW) |
Motor Sound Motor dB (ESCOM) |
Mean Sound Pressure (dB) A |
Noise
pressure spectrum readings (dB) at mid band frequencies (Hz) of: |
|||||||
| 63 | 125 | 250 | 500 | 1000 | 2000 | 4000 | 8000 | ||||
| 90S | 0.75 | ||||||||||
| D90L | 1.1 | 63 | 45 | 28.5 | 30.9 | 27.8 | 43.8 | 34.2 | 30.2 | 31.5 | 15.3 |
| D100L | 1.5 | 67 | 48.6 | 29.2 | 38.3 | 32.1 | 45.6 | 36.4 | 45.9 | 29.9 | 17.5 |
| D112M | 2.2 | 67 | 48.6 | 29.2 | 38.3 | 32.1 | 456 | 36.4 | 45.9 | 29.9 | 17.5 |
| D132S | 3.0 | 65 | 47.3 | 45.9 | 52.3 | 40.4 | 43.2 | 43.4 | 38.7 | 27.3 | 29.5 |
| D132M | 4.0 | 65 | 47.3 | 45.9 | 52.3 | 40.4 | 43.2 | 43.4 | 38.7 | 27.3 | 29.5 |
| D132M | 5.5 | 65 | 47.3 | 45.9 | 52.3 | 40.4 | 43.2 | 43.4 | 38.7 | 27.3 | 29.5 |
| D160M | 7.5 | 70.5 | 52.5 | 47 | 37 | 50 | 42.5 | 50 | 46.5 | 35 | 21.5 |
| D160L | 11 | 70.5 | 52.5 | 47 | 37 | 50 | 42.5 | 50 | 46.5 | 35 | 21.5 |
| D180L | 15 | 76 | 58 | 42 | 42 | 51.5 | 57 | 55.5 | 45.5 | 35.5 | 27 |
| D200L | 18.5 | 76 | 58 | 50 | 47 | 51.5 | 55 | 54 | 52 | 43 | 29.5 |
| D200L | 22 | 76 | 58 | 50 | 47 | 51.5 | 55 | 54 | 52 | 43 | 29.5 |
| D225M | 30 | 79 | 61 | 59.5 | 56 | 57 | 60 | 57.5 | 53.5 | 45 | 38 |
| D250S | 37 | 75 | 57.5 | 49.5 | 53 | 57 | 55 | 52 | 46 | 34 | |
| D250M | 45 | 84 | 66.5 | 59 | 63.5 | 64.5 | 52.5 | 48 | 37.5 | ||
| D280S | 55 | 79.5 | 62 | 54 | 59.5 | 61 | 58 | 52.5 | 49 | 45 | |
| D280M | 75 | ||||||||||
| D315S | 90 | ||||||||||
| D315M | 110 | 85.5 | 68 | 59.5 | 55.5 | 63.5 | 67.5 | 63.5 | 59.5 | 61.5 | 44 |
| D315MX | 150 | 87 | 69.5 | 57 | 58 | 66.5 | 68 | 65.5 | 59 | 53 | 50.5 |
Synchronous Speed: 750 r/min.
| Frame Size |
Output (kW) |
Motor Sound Motor dB (ESCOM) |
Mean Sound Pressure (dB) A |
Noise
pressure spectrum readings (dB) at mid band frequencies (Hz) of: |
|||||||
| 63 | 125 | 250 | 500 | 1000 | 2000 | 4000 | 8000 | ||||
|
D100L |
0,75 |
69 |
50,7 |
28,3 |
36,3 |
37,7 |
52,9 |
43 |
35,3 |
20,3 |
12,0 |
|
D100L |
1,1 |
69 |
50,7 |
28,3 |
36,3 |
37,7 |
52,9 |
43 |
35,3 |
20,3 |
12,0 |
| D112M | 1,5 | ||||||||||
|
D132S |
2,2 |
66 |
47,7 |
32,4 |
44,3 |
32,4 |
48,9 |
38,8 |
34,4 |
30,2 |
15,0 |
|
D132M |
3,0 |
66 |
47,7 |
32,4 |
44,3 |
32,4 |
48,9 |
.38,8 |
34,4 |
38,2 |
15,0 |
|
D160M |
4,0 |
73 |
55 |
37 |
39 |
46 |
56 |
48,5 |
42,5 |
30,5 |
16,0 |
|
D160M |
5,5 |
73 |
55 |
37 |
39 |
46 |
56 |
48,5 |
42,5 |
30,5 |
16,0 |
|
D160L |
7,5 |
73 |
55 |
37 |
39 |
46 |
56 |
48,5 |
42,5 |
30,5 |
16,0 |
|
D180L |
11 |
74 |
56 |
46 |
38,5 |
52,5 |
57 |
49 |
43 |
28 |
18 |
|
D200L |
15 |
71,5 |
53,5 |
44,5 |
41 |
48 |
52,5 |
49 |
44,5 |
30 |
21 |
| D225S | 18,5 | ||||||||||
| D225M | 22 | ||||||||||
|
D250S |
30 |
71,5 |
54 |
57 |
54 |
52 |
52 |
49 |
46 |
39,5 |
35,5 |
|
D250M |
37 |
||||||||||
|
D280S |
45 |
||||||||||
|
D280M |
55 |
||||||||||
|
D315S |
75 |
||||||||||
|
D315M |
90 |
79,8 |
62,3 |
55,3 |
51,3 |
61,8 |
62,8 |
57,8 |
51,8 |
44,8 |
36,3 |
|
D315MX |
110 |
||||||||||
SLIDE RAILS
|
XC (Hold Dovar Bolt) |
|
|
Dial |
Length |
|
8 |
45 |
|
10 |
50 |
|
12 |
60 |
|
16 |
65 |
|
20 |
90 |
|
24 |
100 |

Fig 93
Slide rails Dimensions in millimetres
|
SLIDE RAIL (MIN) PAIR |
FOR FRAME PER SIZE |
THREAD T | AL | AT | AU | AX | AY | AZ (MAX) |
XA | XB | XD (MAX) |
XC | XE | XF | BT | KG |
| M9080 | 80 | M12 | 355 | 12 | 10 | 30 | 105 | 35 | 45 | 30 | 8 | 6 | 325 | 15 | 95 | 3 |
| 90 | 80 | |||||||||||||||
| 100 | 160 | |||||||||||||||
| M1310 | 112 | M12 | 470 | 16 | 12 | 44 | 170 | 50 | 50 | 45 | 10 | 6 | 430 | 20 | 125 | 11 |
| 132 | 100 | |||||||||||||||
| M1816 | 160 | M16 | 615 | 19 | 15 | 64 | 170 | 75 | 67 | 57 | 12 | 10 | 565 | 25 | 155 | 20 |
| 180 | 125 | |||||||||||||||
| M2220 | 200 | M20 | 785 | 25 | 19 | 82 | 210 | 100 | 80 | 82 | 16 | 12 | 725 | 30 | 190 | 60 |
| 225 | 140 | |||||||||||||||
| M2825 | 250 | M20 | 965 | 30 | 24 | 100 | 275 | 100 | 86 | 82 | 20 | 11 | 885 | 40 | 250 | 80 |
| 280 | 190 | |||||||||||||||
| M0031 | 315 | M24 | 1215 | 40 | 28 | 125 | 355 | 120 | 110 | 95 | 24 | 20 | 1115 | 50 | 330 | 120 |
| 355 |
COUPLING AND PULLEY BORES
MACHINING DETAILSNote: Setscrew must be fitted over keyway in pulley. Couplings and pulleys sent to our works for fitting must be stomped with the GEC ref. No.
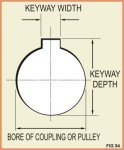
Fig 94
| FRAME SIZE | Bore of COUPLING | PULLEY | Keyway WIDTH | DEPTH | |
| D80 | 18.972 + 0.021 | 18.998 + 0.021 | 5.985 + 0.030 | 21.8 + 0.10 | |
| D90 | 23.972 + 0.021 | 23.998 + 0.021 | 7.982 + 0.036 | 27.3 + 0.20 | |
| D100 | D112 | 27.972 + 0.021 | 27.996 + 0.021 | 7.982 + 0.036 | 31.3 + 0.20 |
| D132 | 37.976 + 0.025 | 38.007 + 0.025 | 9982 + 0.036 | 41.3 + 0.20 | |
| D160 | DW160 | 41.976 + 0.025 | 42.007 + 0.025 | 11.982 + 0.036 | 45.3 + 0.20 |
| D180 | DW180 | 47.976 + 0.025 | 48.007 + 0.025 | 13.978 + 0043 | 51.8 + 0.20 |
| C160 | CW160 | ||||
| D200 | DW200 | ||||
| C180 | CW180 | 54.979 + 0.030 | 55.018 + 0.030 | 15.978 + 0.043 | 59.3 + 0.20 |
| D225* | |||||
| D225 | DW225 | 59.979 + 0.030 | 60.018 + 0.030 | 11.978 + 0.043 | 64.4 + 0.20 |
| C200 | CW200 | ||||
| D250* | CW250* | ||||
| D280* | DW250 | 64.979 + 0.030 | 65.018 + 0.030 | 17.918 + 0.043 | 69.4 + 0.20 |
| C225 | CW225 | ||||
| C250* | C280 | ||||
| D315* | |||||
| D250 | C315* | 69.979 + 8.030 | 70.018 + 0030 | 19.974 + 0.052 | 74.9 + 0.20 |
| C250 | 74.979 + 0030 | 75.018 + 0.030 | 19.974 + 0.052 | 79.9 + 0.20 | |
| CW250 | DW280 | ||||
| D280 | 79.979 + 0.030 | 80.018 + 0030 | 21.974 + 0.052 | 85.4 + 0.20 | |
| DW315 | CW280 | ||||
| D315 | C280 | 84.976 + 0.035 | 85.022 + 0035 | 21. 974 + 0.052 | 90.4 + 0.20 |
| C315 | 89.976 + 0.035 | 90.022 + 0.035 | 24.974 + 0.050 | 95.4 + 0.20 | |
| D315L* | CW315 | ||||
* 2 POLE MOTOR
USEFUL 3-PHASE FORMULAE
USEFUL 3-PHASE FORMULAE
kW = kVA x power factor
kW = HP x 746 1000 x efficiency
kW = line amps x line volts x 1,732 x PF x efficiency 1000
kVA = kW PF
kVA = HP x 746 1000 x efficiency x PF
kVA = line amps x line volts x 1.732 1000
Line amps = kW x 1000 line volts x 1.732 x PF x eff.
Line amps = HP x 746 line volts x 1.732 x eff. x PF
HP = kW x 1000 x efficiency 746
HP = kVA x 1000 x efficiency x PF 746
HP = line amps x line volts x 1,732 x eff. x PF 746 VIBRATION LIMITS
All motors comply with the requirements of SABS 948 (revised), which states that:
When a completely assembled motor (mounted horizontally) is run on no-load at rated voltage and speed, the amplitude of vibration on the bearings, on a horizontal plane through the shaft centre line, shall not exceed the maximum value tabulated below:
|
Speed r/min |
Amplitude (peak to peak) mm max. |
Speed r/min |
Amplitude (peak to peak) mm max. |
| 3000 | 24 | 1000 | 55 |
| 2800 | 25 | 900 | 59 |
| 2600 | 27 | 850 | 61 |
| 2400 | 29 | 800 | 63 |
| 2200 | 31 | 750 | 65 |
| 1500 | 41 | 700 | 68 |
| 1400 | 43 | 650 | 71 |
| 1300 | 45 | 600 | 74 |
| 1200 | 48 |
GREASE RELIEF SYSTEMS
Frames D315L and all 355 frames incorporate full grease relief systems as a standard feature. A similar grease relief system can be incorporated in the foot mounted versions of framesD250-31 5M as an optional extra.
SILENCERS
The sound pressure levels reflected on pages 91 and 92 are typical for the GE( range of motors, using standard external fan and cowl arrangement. As an optional extra, a special fan and/or silencer unit con be supplied which will reduce the sound pressure level on any motor in the 80.355 range to 85 dba measured at 1 m reference radius.
![]()