|
|
|
|
|
|
Electrical Machines - Questions and Answers
Information courtesy of ALSTOM.MOTOR SELECTION FACTORS TO BE CONSIDERED
1. Choice of Motor Cage or Slipring.
This is closely related to accelerating time and method of start, which in turn is associated with load, duty of machine and the supply.
From a price, availability and maintenance point of view, the cage machine must be first choice. Apart from special cases, such as speed matching/control, slipring machines are generally required:
Where high starting torque with a low starting current is necessary.
Where the accelerating time is long, due to a high value of referred load inertia.
When the duty involves frequent inching/starting/plugging.
Note that the above are general statements only, and should not be regarded as 'rules'. Quite often cage machines are driving high inertia loads with quite lengthy accelerating times, especially if the number of starts is low - say one or two starts per day.
Similarly, cage machines are often used for frequent inching/starting/plugging, providing that the referred inertia is low and, if the motor is on NO LOAD between starts.

Fig 63
If the particular application is referred to the Motor Sales Department, then the possibility of using a cage machine can be considered.
When using slipring machines for speed control, power is wasted in the external rotor resistance and speed regulation is not very good.
Cage machines are also suitable for some slipring applications when driving through a slipping clutch arrangement such as a fluid coupling.
2. Slipring Induction Motor
The essential employment for Slipring induction motors is to obtain a high starting torque with a low starting current, by means of inserting external resistance in the rotor circuit. The combination of high torque and low current make this machine ideal for high inertia loads having a long accelerating time. Slipring machines are also used for frequent starting and reversing duty, where the external rotor resistance limits the current to safe proportions.
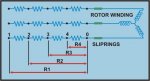
Fig 64
The effects of adding resistance to the rotor circuit is illustrated in the figure.
The torque speed is caused to move to the left from the ring's SC position, thus increasing the starting torque up to a maximum value when maximum torque occurs at standstill. Increasing the rotor resistance beyond the value which puts maximum torque at start, causes the starting torque to fall.
Increasing the rotor resistance causes the current to fall to any pre-required value.
Thus it can be seen that a high starting torque can be available during the accelerating period, while the starting current remains relatively low.
3. Enclosure & Degrees of Protection
The degrees of protection available conform to the requirements of the IP code in SABS 948 (revised), IEC 34-5 and BS 4999/20.
Standard motors are designed to IP 44. Protection to IP 45, P 46, IP 54, IP 55 and IP 56 can also be provided.
| Code | Protection Offered By These Codes Are Against | ||
| IP20 | Contact with live or moving parts greater than 12 mm thickness. | Ingress of foreign bodies with diametre greater than 12 mm. | no protection against water |
| IP21 | harmful effects of vertical drips of water | ||
| IP22 | harmful effects of of drips of water at 15° to vertical | ||
| IP44 | Contact with live or moving parts greater than 1 mm thickness. | Ingress of foreign bodies with diametre greater than 1 mm. | harmful effects of water splashed against the motor from any direction |
| IP45 | harmful effects of water projected from a nozzle from any direction | ||
| IP46 | harmful quantities of water from heavy seas on ships decks entering motors | ||
| IP54 | Any contact with live or moving parts. | Harmful ingress of dust. | harmful effects of water splashed against the motor from any direction |
| IP55 | harmful effects of water projected from a nozzle from any direction | ||
| IP56 | harmful quantities of water from heavy seas on ships decks entering motors | ||
4. Methods of Cooling
The cooling arrangements are in accordance with the SABS 948 (revised), lEC 34-6 and BS 4999/21. In each case, air is circulated by a fan mounted on the motor shaft.
| Code | Type Of Cooling Applicable To These Codes |
| IC 01 | External air is drawn into, and exhausted from, the motor. |
| IC 01 41 | Two separate air circuits. External air flows freely over external surface of motor frame. Internal air scrubs internal surface of motor enclosure. |
| IC 00 41 | No forced external air cooling (free convection). Internal air scrubs internal surfaces of motor enclosure. |
| IC 01 61 | Two separate air circuits through heat exchanger mounted on top of motor. External air circulates through heat exchanger. Internal air circulates through heat exchanger. |
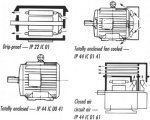
Fig 65
5. Environment
Standard site conditions as defined by SABS 948 (revised). Maximum ambient temperature 40%. Maximum altitude above sea level 1000 m. Maximum relative humidity 95%. Any excesses over the standard ambient and altitude will require consideration, outlined in table.
|
For ambient temperatures greater than 40°C but not exceeding 60°C, the percentage of rated output available is: |
For altitudes above 1000 m, but not exceeding 3000 m above sea level, the percentage of rated output available is: |
||||
| Ambient | Standard Motor Insulation Class |
Altitude asl. | Standard Motor Insulation Class |
||
| °C | B | F | m | B | F |
40 |
100 |
100 |
1000 |
100 |
100 |
41 |
99,4 |
100 |
1100 |
96,3 |
|
42 |
98,1 |
100 |
1200 |
96,0 |
|
43 |
98,0 |
100 |
1300 |
95,6 |
|
44 |
97,3 |
100 |
1400 |
95,3 |
|
45 |
96,6 |
100 |
1500 |
95,0 |
|
46 |
95,8 |
100 |
1600 |
94,6 |
|
41 |
95,1 |
100 |
1700 |
94,3 |
|
48 |
94,3 |
100 |
1800 |
94,0 |
|
49 |
93,4 |
100 |
1900 |
93,6 |
|
50 |
92,6 |
100 |
2000 |
93,3 |
|
51 |
91,7 |
100 |
2100 |
93,0 |
|
52 |
90,1 |
100 |
2200 |
92,6 |
|
53 |
89,7 |
100 |
2300 |
92,3 |
|
54 |
88,7 |
100 |
2400 |
92,0 |
|
55 |
87,7 |
99 |
2500 |
91,6 |
|
56 |
86,6 |
98 |
2600 |
91,3 |
|
51 |
85,4 |
97 |
2700 |
91,0 |
|
58 |
84,2 |
96 |
2800 |
90,6 |
|
59 |
83,0 |
95 |
2900 |
90,3 |
|
60 |
81,6 |
94 |
3000 |
90,0 |
100 |
In the case of higher ambients/altitudes - refer to works.
6. Relative Humidity (RH)
For RH higher than 95 percent, extra impregnation and bake is recommended. For 100 per cent RH at any temperature, heaters are advisable.
7. Site Conditions
Site conditions determine the type of enclosure to be selected. For general guidance, the following enclosures apply:
| Site | Enclosure |
| Clean indoor | IP 22 |
| Outdoor | IP 44 (standard motor is weather protected) |
| Dirty indoor | IP 44/IP 54 |
| Water spray (hosepipe, etc.) | IP 45/IP 55 |
| Exposed to heavy seas on ships decks | IP 46 (extra
impregnation) i.e. intermittent short time submersion) |
| Chemical | IP 44 (chemical atmosphere works finish applied) |
| Steelworks/Mines | IP 44/IP 54 and heavy duty frames |
| Hazardous areas | Refer to installation & Maintenance |
8. Type of Construction and Mounting Arrangements
Motors are available with the type of construction and mounting arrangements indicated in fig 66 Mounting designations comply with SABS 948 (revised)

Fig 66
9. Insulation Class
Insulation materials are arranged in 'Classes' according to the maximum permissible temperature at which the material is suitable for continuous operation. These 'classes' were determined from the result of tests which have extended from approximately 1920 onwards and, from the experience of major electrical machines manufacturers. Results were correlated and recommendations published in various national specifications, viz: lEC Publication 85 (1957) VDE 0530, Part 1/1.69 BSS 2757: 1956
|
MAXIMUM CONTINUOUS
WORKING TEMPERATURE |
|||
| Class | Rise °C |
Ambient °C |
Total °C |
| E | 75 | 40 | 115 |
| B | 80 | 40 | 120 |
| F | 100 | 40 | 140 |
| H | 125 | 40 | 165 |
These temperature rises are as specified by SABS 948, BSS 4999, part 32, BS 2613 and VDE 0530 and apply to the temperature rise of the winding, as determined by the increase in its resistance.
10. Standard Motors - Insulation Class
All motors (including watt motors) up to and including C/D 200 size - Class B with Class B rise.
All motor sizes C/D 225 to C/B 355 inclusive - Class F with Class B rise.
11. Cable Entry
Terminal Box Position (Aluminium Frame DZ 80-112 Inclusive)
Terminal box is situated on top of the motor and can be positioned to point in any one of four directions at 90° to each other.
The position of cable entry on standard motors is at the right hand side, looking on shaft end as required by SABS 948.
Fig 67
Terminal Box Position (Aluminium Frame DZ 132-180 inclusive)
(CI FRAME D/C 80.31 SM inclusive) right hand side looking on shaft end and can be positioned to point in any one of four directions at 90 to each other. See Fig 68

Fig 68
Terminal Box Position
Cast Iron Frame 80 - 315
The terminal box is situated on top of the motor and can be positioned to point in any one of four directions at 90° to each other.
Fig 69
Terminal Box Position C/D 355
Terminal box is situated on right hand side looking on shaft end and can be positioned to point in any one of four directions at 90 to each other.
A blank flange is available on the opposite side for the LI-I mounted box when required. This must be stated when ordering.
Fig 70
12. Rotation
The standard direction of rotation is clockwise looking on shaft end as required by SABS 1804.
This is achieved when the alphabetical sequence on the phase groups, corresponds to the time sequence of the supply.
All motors are BI - DIRECTIONAL from 80 to 315 - all poles and 355 sizes inclusive 4, 6, 8, 10, 12 poles
Only the 355 2-pole is uni-directional
They have uni-directional fans, and will be delivered suitable for the standard direction of rotation, unless advised otherwise at the order stage.
To Reverse Rotation
Opposite direction of rotation can be obtained by: 6 ENDS OUT
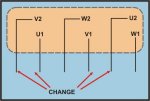
Fig 70a
Change-over the leads going to U1 and V1 also change-over the leads going to U2 and V2
3 ENDS OUT
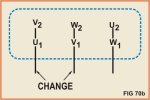
Fig 70b
Change-over the leads going to U1 and V1
13. Methods of Start
Terminology
The terms given in italics are those given in SABS 948 (revised). Also given are common alternatives.
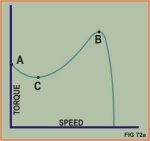
Fig. 72a
Point 'A' Breakaway torque / stalled torque / starting torque - The torque developed when the rotor is stationary and when the motor is supplied with rated volts and frequency, transient phenomena being ignored.
Point 'B' Pull-out torque / maximum torque / stalling torque - The maximum torque that can be applied beyond full load torque, before the motor pulls out. Refer Fig. 72b. The lowest torque developed between zero speed and the speed corresponding to the pull-out torque.
Point 'C' Pull-up torque / run-up torque - The lowest torque development between zero speed and the speed corresponding to the pull-out torque.
Point 'D' Breakaway starting current / starting current / stalled current / locked rotor current - The rms current drawn by the motor when the rotor is stationary, and the motor is supplied with rated volts and frequency, transient phenomena being ignored.
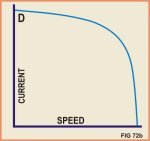
Fig. 72b Point C Pull-up torque run up torque
Direct on Line
Full volts is switched directly onto the motor terminals.
Starting torque and current in the order of 200 and 600 percent full load values respectively on small motors.
As copper losses are proportional to current squared during start, copper losses are in the order of 36 times normal. Therefore, frequent starting or starting against high inertia loads by DOL method should not be undertaken without reference to Motor Sales Department.
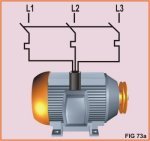
Fig 73a
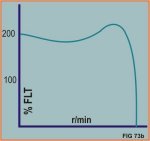
Fig 73b Typical torque speed curve
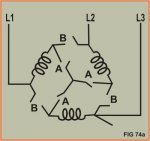
Star-Delta Start
The starter connects the six terminal motor first into star (contacts 'A' close) then after an adjustable time period into delta (contacts 'A' open and contacts 'B' close).
Starting torque and current are between one third to one quarter of the equivalent DOL value.
|
Fig 74a |
Fig 74b |
Fig 74 Figures 74a and 74b indicate two features to be guarded against when using star-delta start.
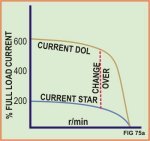
Fig 75a Change-over from star into delta at too low a speed results in a current surge which rises almost to the DOL value.
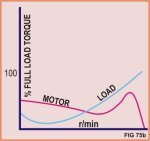
Fig 75b Mismatching of motor torque speed curve and the load torque speed curve. In the example shown, the motor would crawl at approximately 50 percent rated speed.
Auto-Transformer Starting
To provide low voltage starting, the secondary voltage of an auto-transformer is tapped off, usually at approximately 50, 65 and 80 percent of full volts.
Only one tapping is used, depending upon the starting torque/current required.
NOTE: Starting torque and current reduce approximately as the square of the reduction in volts.
Fig 76a

Fig 76b Typical torque speed curve
Statormatic Starting
A tank of electrolyte, the resistance of which reduces as temperature increases, is connected in series with each supply line.
As starting current flows, the electrolyte heats and its resistance falls. The voltage at the motor terminals gradually increases from a pre-set minimum value, resulting in a rising torque/speed curve. At full speed the tanks are shorted out.
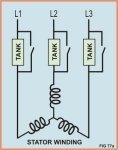
Fig 77a

Fig 77b Comparison of DOl, Star and Statormatic Torque speed curves.
Advantages:-
- The rising torque/speed characteristic.
- Negligible transient when shorting out tanks.
ACCELERATING TIME
Two factors are necessary to facilitate calculation of accelerating time:-
- Average accelerating torque.
- Total inertia, which is the sum of:
- referred value of load inertia,
- motor inertia.
a. Average Accelerating Torque
Average accelerating torque is equal to the average height that the developed motor torque lies above the load torque, during the run-up period.
i.e. average accelerating torque = average height of the shaded area in the diagrams below.
If either the motor torque/speed curve, or the load torque speed curve are not available then, to obtain a first approximation of accelerating time, use:
DOL Start - average accelerating torque = 100% FLT
STAR-DELTA Start - average accelerating torque = 25% FLT
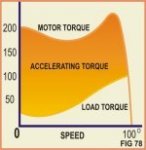
Fig 78a Direct on-line starting of fan
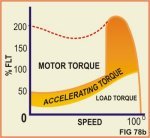
Fig 78b Star Delta starting of fan
b. Inertia
i. Referred Value of Load Inertia
If the load speed differs from the motor speed, the load inertia must be referred to the motor speed.
| referred inertia = actual inertia x | ( | load speed | )2 |
| motor speed |
2b. Motor inertia
This is available from motor performance tables.
Accelerating time:
If total inertia I = MK2 (kg m2) where M = mass (kg)
where K = radius of gyration (m)Therefore
accelerating time = (
IN )2
93T where N = motor r/min
where T = av. acc. torque (kgm)
If total inertia I = GD2 (kg m2) where M = mass (kg)
where K = diametre of gyration (m)Therefore
accelerating time = (
IN )2
37.2T where N = motor r/min
where T = av. acc. torque (N.m)
If total inertia I = MK2 (lb ft2) where M = mass (lb)
where K = radius of gyration (ft)Therefore
accelerating time = (
IN )2
308T where N = motor r/min
where T = av. acc. torque (lbft)ALSO:-
RUT =
2π x IN 60 T Where I = WR2 (kgm2)
Where T = Nm (FLT)
Where N = Rpm14. Duty
The duty of a motor is an account of the duration and magnitude of loads, no load periods, and rest periods, to which it is subjected.
Necessary information required to assess duty suitability:
- Load inertia referred to motor speed
- Number of starts per hour
- Magnitude of load
- Duration of load
- Number of stops per hour
- Method of stopping mechanical brake reverse current DC injection
- Details of any no-load periods.
Cyclic Duration Factor (usually expressed as a percentage) is:
The ratio of the period of loading to the period of a complete cycle (the period of loading includes starting and electric braking).
SABS 948 (revised), BSS 4999, part 30, VDE 0530 and CENEL 2B/3, have classified the duty of a motor as:
S1 - Continuous Running Duty
Operation at constant load indefinitely.
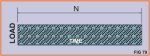
Fig 79 N = operation at rated load
S2 - Short Time Duty
Operation at constant load for a specific time
e.g. S2 - 30 minutes, after which the motor must cool to ambient temperature before re-starting.

Fig 80 N = operation at rated load
S3 - Intermittent Periodic Duty
A sequence of identical duty cycles, each including a period of operation at constant load plus a rest and de-energised period.
The abbreviation S3 is followed by the cyclic duration factor

Fig 81
N = operated at rated load R = at rest and de-energised Cyclic duration factor = N N + R e.g. 53 - 25 percent.
S4 - Intermittent Periodic Duty
A sequence of identical duty cycles, each consisting of a period of starting, a period of operation at constant load and a rest and de-energised period.
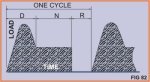
Fig 82
D = starting N = operated at rated load R = at rest and de-energised Cyclic duration factor = D + N D + N + R The abbreviation S4 is followed by the cyclic duration factor
e.g. S4 - 25 percent.
S5 - Intermittent Periodic Duty with starting and electric braking
A sequence of identical duty cycles, each cycle consisting of a period of starting, a period of operation at constant load, a period of rapid electric braking and a rest and de-energised period.
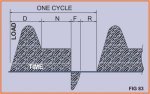
Fig 83
D = starting N = operated at rated load R = at rest and de-energised Cyclic duration factor = D + N + F D + N + F + R The abbreviation S5 is followed by the cyclic duration factor
e.g. S5 - 40 percent.
S6 - Continuous Operation Duty
A sequence of identical duty cycles, each consisting of a period of operation at constant load and a period of operation on no load (i.e. motor still running but unloaded).
The abbreviation S6 is followed by the cyclic duration factor
e.g. S6 - 40 percent.
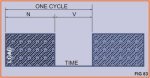
Fig 84
N = operation at rated load V = operation on no load Cyclic duration factor = N N + V DUTY CYCLE - RMS VALUE
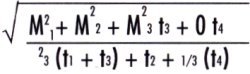
Before proceeding to determine the rms value of a duty cycle, it is essential to establish whether the cycle consists of periods of acceleration and/or deceleration. Over these periods, the average speed is approximately half full speed and therefore allowance must be made for the reduced cooling - unless the motor is force ventilated. The efficiency of cooling is even more reduced when the motor is stationary.
To take account of this, the rms value of a duty cycle is corrected by a factor which represents the difference between the average dissipation of heat throughout the cycle and the dissipation at constant speed. This factor depends upon the percentage of time of acceleration / deceleration or rest. During acceleration or deceleration, cooling is assumed to be two-thirds of that at full speed, while at standstill, the cooling is assumed to be one-third of that at full speed.
These corrections are self-evident in the following formula:
rms torque =
where M represents torque and t represents time.
NOTE: With some duty cycles, the rating of the motor is determined by the maximum torque required, not by the rms value of the duty cycle.
For example: a peaky cycle such as that shown would have a very low rms value. A motor rated at this rms value would have insufficient overload capacity to handle the maximum torque.

Fig 85a
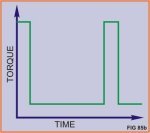
Fig 85b
15. Starting Class
The starting class for a motor indicates the maximum permissible number of starts per hour distinguishing between:-
complete starts,
jogs,
electric braking.
It is assumed that
one jog is thermally equal to 25 percent of a complete start,
one reverse current braking operation to one third of rated speed is thermally equal to 80 percent of a complete start.
| Starting | Cyclic operation | |||||
| Equivalent starting duties | ||||||
|
Starting |
No of starts |
|
No of jogs |
|
No of brakings |
Percent classes |
| 150 | + | 0 | + | 0 | ||
|
Standard |
100 | + | 200 | + | 0 | 25, 40, 60 |
| 65 | + | 130 | + | 65 | ||
| 300 | + | 0 | + | 0 | ||
|
300 |
200 | + | 400 | + | 0 | 40, 60 |
| 130 | + | 260 | + | 130 | ||
| 600 | + | 0 | + | 0 | ||
|
600 |
400 | + | 800 | + | 0 | 60 |
| 260 | + | 520 | + | 260 | ||
16. Motor Selection
Hoisting Duty
The kW required to hoist a specific mass can be calculated from:
kW= Mv 102 Where:-
M = mass to be lifted (kilograms)
V = velocity of lift (m/sec)
= mechanical per unit efficiency of hoist.Horizontal Duty
The kW required to move a specific mass in a horizontal direction can be calculated from:
| kW = | MδV |
| 102 |
Where:-
M = mass to be moved in metric tons)
= friction factor (in kg per metric ton)
V = linear velocity (in metres/second)
δ = mechanical per unit efficiency.
![]()