|
|
|
|
|
|
Electrical Machines - Questions and Answers
Information courtesy of ALSTOM.SPEED CONTROL OF A.C. MOTORS
1. What three-phase motors are available for speed control?
In addition to the slip-ring motor, the following:
- Pole changing or, more recently, pole-amplitude modulated squirrel-cage induction motors suitable for drives requiring two or three predetermined speeds.
- Induction motors with thyristor controllers to provide a variable frequency supply.
- Commutator motors of various types in which the rotor is supplied with a voltage of its own, allowing the speed to be varied over a wide range without energy losses.
- Combinations of induction motors and AC commutator machines, making possible any desired control of speed.
2. How can an induction motor be wound to give two or more speeds?
The stator can be wound with two separate windings each with differing numbers of poles. By switching the supply lines from one to the other winding such a stator can be made to give two different speeds. E.g. 8-pole and 10-pole windings would give speeds of 750 and 600 r/min (synchronous).
Another method of obtaining two speeds is to arrange a single winding, so that, by reversing one half of the coils, it can be changed to a winding having double the number of poles, e.g. 4-pole to an 8-pole winding. This is called a pole-change or tapped winding and the principle is shown in the diagram. Carrying the idea further, two tapped windings can be used, resulting in a four-speed machine, e.g. 4/8 and 6/12 poles to give 1 500/750 r/min and 1000/500 r/min (synchronous).
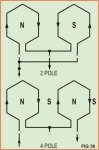
Fig. 38 - Basic arrangement of pole-change or tapped windings.
3. What is pole amplitude modulation?
This is a technique used in the design of three-phase induction motor stator windings. Using p.a.m. the motor can be arranged to have two or more different operating speeds with only a single stator winding. Unlike the pole-change winding, speed ratios other than 2:1 can be obtained. Basically, selected halves of the phase windings are reversed; special groupings of the coil are used and in some cases certain coils are omitted. The switching is done by control circuitry external to the motor. A typical torque/speed characteristic for a p.a.m. motor designed for operation at two speeds in the ratio 1.5:1 is shown in Figure 39.
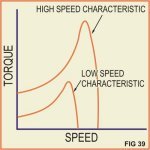
Fig. 39 - Torque-speed characteristics for two-speed p.a.m. motor with speeds in the ratio 1,5:1.
4. How are p.a.m. windings connected to give two motor speeds?
Many different configurations are possible, depending on the particular application but figure 40 shows a typical one. For low speed operation the control gear connects the half phase windings in the series-star configuration, and for high speeds the windings are connected in parallel star.

Fig. 40 - Winding arrangement for a two-speed p.a.m. motor.
For normal (unmodulated) operation: supply U3, V3 and W3, isolate U2, V2 and W2.
For modulated operation: supply 112, V2 and W2, join U3, V3 and W3.5. What are p.a.m. motors used for?
Applications where speed is not so critical, as in ventilation fans and some types of pumps, do not require a continuously variable speed motor with the consequent expense. Here the relative cheapness of the p.a.m. motor compared with the equivalent two-winding type is leading to the increasing use of the p.a.m. motors for these applications.
6. What other form of speed control is used with induction motors?
Continuously variable speed can be obtained if the stator is fed with a three-phase voltage of variable frequency. Using solid-state switches known as thyristors, the frequency of the supply can be varied from zero up to about four times its original value, and this allows the speed of the motor to be varied continuously over a wide range.
7. What is a thyristor?
This is a three-terminal solid-state device (Figure 41) that will conduct in one direction only (from anode to cathode) and then only when it is 'fired' by a pulse applied to the gate terminal. When used with an AC supply, the thyristor will conduct, after being fired, on the positive half cycle of the supply, but when the polarity reverses it switches off by itself. When the supply goes positive a pulse must be applied to the gate of the thyristor to switch it on again. The two types of controller in most general use for controlling induction motors are the cycloconverter and the DC link inverter.
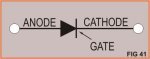
Fig. 41 - Symbol for a thyristor -a three-terminal solid state switch.
The thyristor therefore permits the squirrel-cage induction motor to be used for variable speed applications, with the motor's attendant advantages of ruggedness, cheapness and high power to weight ratio.
8. What are the disadvantages of thyristor controllers?
The main drawbacks are the cost of the thyristors and associated circuitry and the production of harmonics in the motor and the supply system. The particular disadvantage of the cycloconverter is its restricted output frequency which limits the maximum speed of any motor with which it is used. The DC link inverter does not suffer from this limitation as it provides a much greater range of speeds, but it involves the use of more thyristors and it is therefore more expensive.
9. What are the three main types of 3-phase AC commutator motor?
- Stator-fed.
- Rotor-fed (or Scharge).
- Series.
10. What is the effect of supplying the rotor winding with a voltage from an external source?
By injecting an externally-applied variable voltage of the required frequency (through a commutator) into the rotor winding, it is possible to vary the speed of the motor above and below synchronous speed. About each of these speeds the motor behaves in the same fashion as a normal induction motor.
The principle can be explained by taking the simple example of a rotor with a stand-still voltage of 100 volts induced in its windings by the rotating magnetic field with the rotor windings short-circuited. The rotor will run up to near synchronous speed if unloaded, until in fact the rotor voltage is practically zero and sufficient current flows to supply the very small torque on no-load. If now an e.m.f. of 20 volts is supplied to the rotor in the opposite direction to, and at the same frequency as, the voltage normally induced from the rotating field, the motor will respond by running at such a speed that about 20 volts is induced in it from the field.
This induced voltage will occur when the slip is 20 per cent (or speed is 80 per cent) of the synchronous speed, and at this point the induced rotor voltage and the voltage applied to the rotor externally will practically balance.
If the 20 volts injected into the rotor winding is in the same direction as the normal induced rotor voltage, the motor will run up to 20 percent above synchronism the rotor induced voltage reverses.
11. How does this method of speed variation compare in efficiency with rotor-resistance control of speed?
It is much more efficient because the power applied to the rotor is returned to the line. Also, changes in load do not result in large fluctuations in speed.
12. How does a variable-speed stator-fed AC commutator motor operate?
The stator winding is of the induction motor type, fed from the AC supply. The rotor winding is connected to a commutator instead of slip-rings and resembles an ordinary DC armature. Brushes are equally-spaced around the commutator according to the number of phases. For example, a 2-pole rotor could have 3-brushes equally spaced to give three phases.
The important fact to note is that the rotating field set up by the stator windings sweeps past the brushes as synchronous speed and consequently the frequency of the e.m.f. appearing at the brushes is the same as that in the stator. With a 50 Hz supply to the stator, the brush frequency will also be 50 Hz no matter at what speed the rotor is moving.
Hence if we wish to supply an e.m.f. of the rotor in order to vary the speed, we can do this from a 50Hz supply. This supply to the rotor brushes is normally obtained through an induction regulator which acts in effect like a variable-ratio transformer, enabling the injected voltage to be varied smoothly to any desired value.
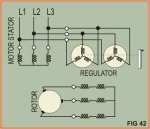
Fig. 42 - Connections for stator-fed AC commutator motor.
The arrangement is usually called the stator-fed or fixed-brush shunt-characteristic AC commutator motor.
13. How does the variable-speed rotor-fed AC commutator motor work?
In this type of motor, also called the Scharge or variable-brush AC commutator motor, a different method of injecting the speed-varying e.m.f. into the secondary winding is employed. Referring to Figure 45, the supply is led to the rotor winding through slip rings, the rotor winding being the primary. The secondary winding is on the stator. On the rotor is an additional regulating winding with a commutator. The ends of the stator (secondary) windings are connected to brushes disposed on the commutator.
The first point to notice is that when the rotor is at standstill, the rotating field sweeps past the secondary winding and the brushes at synchronous speed. As the motor gains speed, the frequency in the secondary windings and, due to the commutator, the frequency at the brushes are both reduced simultaneously. No matter at what speed the rotor is moving, the brush frequency ties up with the secondary frequency and, as a result, voltage can be picked up from the commutator and injected into the secondary windings.
The method of varying the e.m.f. injected into the secondary windings is by altering the amount of commutator spanned by each pair of brushes. The pairs of brushes are arranged so that they can be moved simultaneously equal distances from the in-line position. When in-line, each pair of brushes rests on the same commutator segment. At this position, each secondary phase winding is short-circuited and no phase voltage is injected; consequently the speed is that of a normal induction motor. Movement of the brushes in one direction or the other increases or decreases the speed. Brush movement can be done by hand wheel or by means of a small servo or pilot motor, remotely-controlled. The general characteristics of this rotor-fed motor are the same as those of the stator-fed type.
14. How does the variable-speed series AC commutator motor work?
A series characteristic is provided by connecting the stator and rotor in series, as shown in the diagram. The commutator on the rotor is fed from a transformer because, in general, the supply voltage is too high to allow of satisfactory commutation. It is also useful when the supply is high-tension (e.g. 3300 volts) and constitutes one advantage of this type, since it is virtually impossible to arrange a rotor-fed motor for a high-tension supply, although the stator-fed type is somewhat easier in this respect.
Speed is controlled by brush movement, which has the effect of varying the phase agreement between the staler and rotor and thus strengthening or weakening the field.

Fig. 43 - Arrangement of windings of rotor-fed (Scharge) AC commutator motor.
'P' is the primary winding, located on the rotor underneath the commutator winding and supplied through slip rings. 'S' is the secondary winding located on stator. 'C' is the commutator.The speed-torque characteristic is very similar to that of a DC series motor, with the difference that even at the highest speed setting the no-load speed rises to only about 170 percent of the synchronous speed. Hence there is no danger from a run-away speed if the load is removed from the motor. This type of motor is specially suited to large printing press drives as the series characteristic gives a very good load sharing amongst a group of motors driving a press.
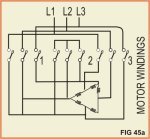
15. What arrangements of control gear are required for squirrel-cage change-pole motors?
The control gear must be selected to suit the motor windings, whether (1) a single tapped winding, (2) two separate windings, (3) two separate windings with one or both tapped.
Contactor starters are usual, although small sizes may be controlled by a single contactor in conjunction with a selector switch.
Direct-on-line starting is normal, but sometimes the contactors are interlocked so that starting must be at the lowest speed connection. This is only specified to protect the driven machine, as a change-pole motor is suitable for starting on any speed connection. For motors with a single tapped winding giving two speeds, three contactors or switch positions are required. Two alternative winding connections commonly used are shown.
For motors having two separate windings giving two speeds, two direct-on-line contactors, one for each winding are used and are interlocked to prevent both closing together.

Fig. 44 - Typical connections of 3-phase series commutator motor.
 |
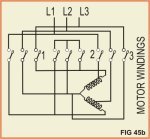 |
Fig. 45 - Basic diagrams of control for two-speed change-pole AC motor.
For motors with two separate windings, one or both tapped, a combination of the above is required.
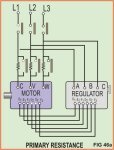
16. How is the stator-fed commutator motor controlled?
The stator-fed commutator motor has the supply taken to the stator, while a separate regulator for speed control is wired to fix brush gear on the commutator.
Depending on the speed range, direct-on-line-starting may be used, with a low-speed interlock fitted on the regulator to ensure that the machine is set for starting before the circuit-breaker or supply contactor can be closed. A typical circuit is shown.
Where the speed range is short, direct-on-line starting may not be permissible and some form of resistance starling is then required. This may be either primary or secondary resistance, rotor resistance being usual on high-voltage supplies or where high torque at starting is required. The diagram shows two methods of connecting the starting resistance.
 |
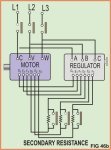 |
Fig. 46 - Resistance starting of stator-fed AC commutator motor.
![]()