|
|
|
|
|
|
Electrical Machines - Questions and Answers
Information courtesy of ALSTOM.SYNCHRONOUS MOTORS
1. What are 3-phase synchronous motors?
Motors of moderate to large power in which the rotor, having been brought up to speed, is pulled into step with the rotating field and therefore runs at a constant synchronous speed. There are two main types - salient-pole synchronous and synchronous-induction. Normally both types have a similar stator winding to that of the induction motor. The winding when connected to the supply develops a rotating field, but after starting instead of using it to induce e.m.f.s. in the rotor conductors, torque is obtained by introducing fixed-polarity magnetic fields on the rotor to operate in conjunction with the current in the staler.
Generally synchronous motors are arranged to start as induction motors and, when up to full induction-motor speed, are converted to synchronous running by injecting direct current into the rotor windings. The rotor then pulls into step with the stator rotating field.
2. How does the rotor of a salient-pole synchronous motor operate?
The rotor has salient-poles similar in construction to the rotor of an alternator.
It usually starts as a squirrel-cage motor by means of copper bars embedded in the pole faces, the bars being connected together by end-rings to form a squirrel-cage winding. After running up to full induction-motor speed, the rotor pulls into synchronism through the action of the DC current flowing in the rotating field coils and derived from a DC exciter.
Lower starting current for a given torque is obtained by employing an insulated 3-phase winding located in the pole faces, instead of using a simple squirrel-cage, the winding being connected through slip rings to an external resistance. The resistance is varied during the starting period as for a slip-ring induction motor.
3. How is the rotor of a synchronous induction motor constructed?
The rotor closely resembles that of a slip-ring induction motor and is run up by means of a rotor-resistance starter in the same way as a slip-ring induction motor. Low-voltage synchronous induction-motors may be of 'inverted' construction, with the primary windings on the rotor and the secondary on the stator.
4. What are the applications of synchronous motors?
The DC excitation of the rotor can be increased to a point where it takes over the magnetizing function of the stator. In this event, the stator power factor is increased to unity, so that no wattless lagging current flows from the supply to the motor. By increasing the excitation current beyond this point, the stator current can be made leading and this leading current can be used to magnetize any other motors connected to the supply in the factory, thus further improving the overall power factor of the system.
The synchronous motor therefore serves the dual purpose of providing a constant-speed drive for a large piece of machinery that requires to be run continuously and at the same time of operating at unity power factor or any desired leading power factor, in order to correct the low power factor in the remainder of the plant.
Synchronous motors are normally suitable for only one specific direction of rotation.
The synchronous-induction motor gives a better starting performance, but the salient-pole type with squirrel-cage is preferred, when starting performance permits, because it gives about 1.5 per cent higher efficiency.
5. What control gear is required for synchronous motors?
The DC-excitation equipment comprises the field switch with discharge resistance and the exciter-field rheostat.
The AC equipment will depend on the type of starting used.
If started as a squirrel-cage induction motor, the damping winding in the pole faces acts as the induction-motor secondary, while the field windings are usually connected to the discharge resistance.
Direct-on-line, auto-transformer or primary resistance or reader starting is usual, depending on the starting current permitted or on the torque required. The motor accelerates to a speed just below synchronism, whereupon the excitation can be adjusted to give the required power factor.
Automatic installations involving starting, synchronizing and possibly power-factor central are available. The majority of synchronous-motor equipments, however, comprise individual units, such as stator oil-switch, auto-transformer or reactor with associated switches if required for starting, and an excitation panel including power factor metre and ammetre.
If the machine is started as a slip-ring motor, a secondary winding in the rotor pole faces may be connected to slip rings; alternatively, the exciting winding may be of the distributed type which also serves as a motor winding for starting purposes. In the first type, the slip-ring winding remains short-circuited after starting and acts as a pole-face damper. With the distributed dual-purpose winding, provision is made in the control gear for connecting it to the exciter for synchronizing.
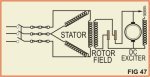
Fig. 47 - Three-phase synchronous motor.
6. What is a reluctance motor?
This is a special form of synchronous motor that does not require excitation of the rotor.
A rotating field is produced by the stator normally by a three-phase winding although single-phase types are available. The important feature of the reluctance motor is that there are two flux paths through the rotor, called the direct axis and quadrature axis. These two paths have very different reluctances and the reluctance torque arises from the tendency of the rotor to align itself in the minimum reluctance position relative to the rotating magnetic field. The reluctance torque is maintained only at synchronous speed and so a cage winding is incorporated for starting purposes.
7. What are the applications of reluctance motors?
Reluctance motors are used in synchronized multi-motor drives, for operation of rotating stores in computers, and nuclear rod positioning drives.
![]()