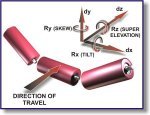
Fig. 1: Idler alignment notation
Quantifying the Effect of Idler Misalignment on Belt Conveyor Tracking
Summary
The alignment of a conveyor's support structure has a significant effect on performance. In particular, tracking, power consumption, wear rates and spillage can often be attributed to poorly aligned structure. Although problems with alignment are widespread, there is not a great deal of published literature available on the subject. This paper looks at the effect of idler misalignment around the vertical axis (idler skew) and attempts to quantify the effect of a skewed idler on the belts tracking. It includes an evaluation of measurements conducted at the University of Newcastle, Australia.
Section 1. Introduction
The interaction between a misaligned idler and the conveyor belt is a complex one. A number of factors are involved including the belt's physical dimensions and resistance to bending, idler orientation, the friction between the belt and the idler, belt mass, material load and belt tension. The most prominent problems which arise as a result of misaligned idlers are mistracking (which can cause problems with load shifting and damage to belt and structure), high wear rates on the belt and idlers, idler failure due to high loading and, in situations where a number of idlers are misaligned, high power consumption.
To assist in the analysis of misaligned idlers a reference for defining the misalignment is required. It is convenient in this case to utilize the "right hand rule" which finds applications in many facets of engineering. Using the direction of belt travel as the prime reference, the right hand rule gives both direction and sense to the six degree's of freedom involved in idler alignment. Fig. 1 shows the notation adopted to define idler misalignment.
In order to simplify the analysis at this stage the problem will be restricted to considering variations in idler skew only. This, in fact, forms a measurement of the performance of a training idler on the conveyor's tracking as well as the effect of a misaligned idler. Further simplification is obtained by considering only an empty belt and by specifically looking at the effect on belt tracking.
Section 2. Idler Misalignment
There are several common causes of idler misalignment. The joining, of two sections of support structure often results in a change in the direction of the centerline of sufficient magnitude to cause problems. Damaged training idlers can result in severe belt mistracking. Difficult installations, such as underground conveyors or overland conveyors following particularly rugged terrain, often require allowances for idler misalignment. Conveyors supported by ropes or chains are notorious for misalignment problems. In all these cases, extra effort at the time of installation is required to minimize the risk of poor performance as a result of misaligned conveyor components.
Linear displacement denoted as dx and dy will effect the forces applied to the belt, idler and structure. Rotational misalignment Ry and Rz will have a significant effect on belt tracking, Rx can be utilized to aid in belt tracking but will result in high belt and idler wear rates. While in some cases idler misalignment can be utilized to aid in performance of the system, such as with training idlers, in general misalignment should be kept to an absolute minimum. Transitions from a troughed to flat belt are another area where idler misalignment is deliberate. An understanding of the effect of this misalignment is essential to minimizing the loads on the belt, idlers and structure. In conveyors containing horizontal or vertical curves allowing for a gradual change in structural alignment is part of the design criteria. Once again deliberate idler misalignment is often utilized to improve the performance of the system (in the case of horizontal curves with super elevation), and a thorough understanding of the effect of this misalignment is required to produce an effective conveyor system.
Fig. 1: Idler alignment notation
There appears to be little published data on the alignment tolerances to which conveyors and components should be constructed. In Australian Standards AS1332,1333 reference is made to "the best possible that can be achieved by surveying". Discussions with a major supplier of conveyor equipment suggested that the structure should be aligned about the required cente line with a tolerance of 2 mm for maximum reliability, and no more than 3 mm. The rotational alignment of any given idler set has the most effect on the belt tracking. Discussions with experienced conveyor aligners suggests that the maximum misalignment in Rz should be no more than 0 degrees 20 minutes of an arc, this equates to 10 mm vertical misalignment of one edge for a mounting separation of 1,8C) 0mm. Deliberate rotation in Rx can be used to aid in belt tracking but may cause wear problems. Rotation in Ry, which forms the subject of this paper, is utilized by training idlers to correct belt mistracking. The measurements indicate that the ability of these idiers to correct mistracking may reach an upper limit at an angle in Ry less than the maximum angle possible in most training idler systems.
Section 3. Forces Acting at a Skewed Idler
There are three primary forces involved in determining where the conveyor will track at a selected idler:
Fg - force due to belt mass and gravity,
Ff - frictional force applied to the belt by an idler where the idler direction and the belts direction of travel are not the same,
Fs - steering force is a function of the idle alignment before and after the point being considered. A skewed idler applies a turning moment on the belt which transferred along the conveyor by the rigity of the belt.
The tracking position of the belt will adjust until these forces are balanced.
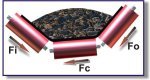
Fig. 2: Gravitational force components
When a belt mistracks on a standard three roll troughing idler the weight of the belt and material acts to restore the belt to the central position. Fig. 2 shows how this force is separated into three components, one for each roller. The total force generated is the arithmetic sum of these components.
Fg = Fo + Fc - Fi
Fi = sin(θta - θsa)(Mbi + Mmi)g
Fc = sin(θsa)(Mbc + Mmc)g
Fo = sin(θta + θsa)(Mbo + Mmo)g
where:
Fg = total gravitational force on belt
Fo,c,iv = outside, center, inside idler force component
θta = troughing angle
Mbi,bc,bo = mass of belt over inside, center, outside idler
g = acceleration due to gravity.

Fig. 3: Forces generated by a skewed idler
Fig. 3 shows the two main forces generated by a skewed idler. The first is a fictional force which acts to move the belt's position on the skewed idler. Based on the measurements discussed later in this paper it is likely that this force has an upper limit where an increase in the idler skew does not result in an increase in the applied force. Fig. 4 shows the variation in belt position at the skewed idler. If we regard the steering force from well-aligned idlers before and after the idler in question as negligible, then the only forces acting at the skewed idler are friction and gravity. The results indicate that the force follows an exponential function as the idler skew is increased.
Ff = Fmax (1 - 1 ea)
where
Ff = total frictional force on belt
Fmax = maximum frictional force
= idler skew angle
a = frictional constant.The second force is a steering force where the idlers apply a turning moment to the belt if the idler direction and belt direction are not the same. This moment is translated up and downstream from the idler by the belts rigidity. Based on the measurements this force appears to have two modes, an initial mode for relatively small skew angles where the forces translated up and downstream are significant, and a second mode where active slip is occurring at the skewed idler and the translated forces, particularly upstream from the idler, are reduced.
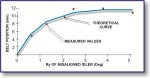
Fig. 4: Belt tracking at the skewed idler
As an initial step in the analysis of this problem we will concentrate on the belt tracking at the skewed idler and the fictional force acting at that point. In order to better quantity the steering force further measurements involving various types of belting with differing moduli are required.
Section 4. Measurements
The measurements were carded out on a test conveyor system located on campus at the University of Newcastle, Australia. the conveying system consists of twin 60m conveyors capable of being loaded with a variety of materials. The main conveyor is fitted with a mid-conveyor drive while the return conveyor, which was used for these measurements, is a standard head drive configuration. Both conveyors have a 6.5m lift and use standard 35 carry idler sets.
In order to evaluate belt tracking a single idler was selected to be misaligned, its position in dz is denoted as 0 m. Tracking was also monitored over the section 12.5m before and 25m following the misaligned idler. Care was taken to ensure that the belts in built tracking signature did not effect the measurements. Every conveyor belt has a tracking variation that is a function of its construction and condition which will repeat for each revolution. To ensure that this variation did not corrupt the measurements the tracking was recorded with the conveyor belt in the position each time a measurement was taken.
As stated earlier this measurement was simplified by limiting misaligned the to a single idler and using an empty belt only. With this in mind we can use Eqs. (1) and (2) applied at the misaligned idler to obtain an equation for mistracking as a function of idler skew.
dx = Fmaxbw 2bmicgsinθta (1 - 1 ea)
where
Fmax - maximum frictional force
bw - belt width
bm - belt mass per unit length
ic - idler spacing
g - acceleration due to gravity
θta - troughing angle
- idler skew angle
a - friction constant.
Fig. 5 shows a graph of the measurement results, this graph can be regarded as looking down on the conveyor in plan view. The tracking position at various locations before and after the misaligned idler are shown.
Inspection of the results shows that the downstream effect on tracking of the skew angle of the misaligned idler reaches a level where there is no increase in mistracking for an increase in skew angle. At this point, the restoring forces of gravity and belt distortion are equal to the force that can be imparted into the belt through the belt/idler interface. The fact that the largest tracking variation does not occur at the skew idler but rather at a downstream idler is also a significant result. This shows that the belt is being "steered" by the skewed idler and, in fact, relies on the next downstream idler to correct its direction.
Fig. 4 shows the measured results for belt mistracking as the idler skew is increased at the misaligned idler. The calculated curve using Eq. (3) is also shown. The two unknown constants in this equation are the maximum frictional force Fmax and the friction constant a. These values are a function of the belt/idler interface and are calculated here based on the measured results. For this conveyor the maximum friction force was 12N and the friction constant was 57. It is hoped that further experiments using various types of belting and idlers will provide more information on quantifying these numbers.
A further observation from the results is the tendency for the tracking downstream from skewed idler to decay back to zero over a longer distance than rise to the peak from the upstream direction. In other words, the tracking at each idler set is affected more by the idler upstream from it than by the idler downstream. An indication of this difference is given by the slope of the graphs in Fig. 5 before and after the peak mistracking point. Based on these slopes, the effect of the upstream idler is larger by a factor of approximately 2 for this particular conveyor.
Section 6. Conclusion
The measurements conducted with a single skewed idler have shown that the effect on belt tracking can be seen a significant distance both upstream and downstream from the misaligned idler. It is noted that the point of largest tracking variation does not occur at the idler which is misaligned but further downstream. One could postulate that a higher modulus belt, for example a steel cord belt, may, in fact, show a peak in mistracking a number of idler sets downstream from the misaligned idler rather than one set downstream as in these measurements.
From the perspective of design and operation of conveyor systems, these measurements demonstrate the significant effect misaligned idlers can have on the conveyors performance. Bearing in mind that this experiment skewed a single idler set, a number of misaligned idlers would cause large deviations in the belts tracking position.
An equation for quantifying the mistracking resulting from a single skewed idler has been proposed. This will provide a basis for further work to establish a model for predicting the mistracking of a conveyor as a result of skewed idlers.
References
[1] MATON, A.E.: The effect of idler alignment and belt properties on conveyor belt power consumption; bulk solids handling Vol. 11 (1991) No. 4, pp. 801-805.
[2] BARFOOT, G.J. and SCOTT, 0.J.: The effect of idler misalignment on conveyor performance; Engineering Safety Seminar. 1 May 1992, Penrith, Australia, Department of Mineral Resources NSW.
![]()